1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
360
361
362
363
364
365
366
367
368
369
370
371
372
373
374
375
376
377
378
379
380
381
382
383
384
385
386
387
388
389
390
391
392
393
394
395
396
397
398
399
400
401
402
403
404
405
406
407
408
409
410
411
412
413
414
415
416
417
418
419
420
421
422
423
424
425
426
427
428
429
430
431
432
433
434
435
436
437
438
439
440
441
442
443
444
445
446
447
448
449
450
451
452
453
454
455
456
457
458
459
460
461
462
463
464
465
466
467
468
469
470
471
472
473
474
475
476
477
478
479
480
481
482
483
484
485
486
487
488
489
490
491
492
493
494
495
496
497
498
499
500
501
502
503
504
505
506
507
508
509
510
511
512
513
514
515
516
517
518
519
520
521
522
523
524
525
526
527
528
529
530
531
532
533
534
535
536
537
538
539
540
541
542
543
544
545
546
547
548
549
550
551
552
553
554
555
556
557
558
559
560
561
562
563
564
565
566
567
568
569
570
571
572
573
574
575
576
577
578
579
580
581
582
583
584
585
586
587
588
589
590
591
592
593
594
595
596
597
598
599
600
601
602
603
604
605
606
607
608
609
610
611
612
613
614
615
616
617
618
619
620
621
622
623
624
625
626
627
628
629
630
631
632
633
634
635
636
637
638
639
640
641
642
643
644
645
646
647
648
649
650
651
652
653
654
655
656
657
658
659
660
661
662
663
664
665
666
667
668
669
670
671
672
673
674
675
676
677
678
679
680
681
682
683
684
685
686
687
688
689
690
691
692
693
694
695
696
697
698
699
700
701
702
703
704
705
706
707
708
709
710
711
712
713
714
715
716
717
718
719
720
721
722
723
724
725
726
727
728
729
730
731
732
733
734
735
736
737
738
739
740
741
742
743
744
745
746
747
748
749
750
751
752
753
754
755
756
757
758
759
760
761
762
763
764
765
766
767
768
769
770
771
772
773
774
775
776
777
778
779
780
781
782
783
784
785
786
787
788
789
790
791
792
793
794
795
796
797
798
799
800
801
802
803
804
805
806
807
808
809
810
811
812
813
814
815
816
817
818
819
820
821
822
823
824
825
826
827
828
829
830
831
832
833
834
835
836
837
838
839
840
841
842
843
844
845
846
847
848
849
850
851
852
853
854
855
856
857
858
859
860
861
862
863
864
865
866
867
868
869
870
871
872
873
874
875
876
877
878
879
880
881
882
883
884
885
886
887
888
889
890
891
892
893
894
| # This Python 3 environment comes with many helpful analytics libraries installed
# It is defined by the kaggle/python docker image: https://github.com/kaggle/docker-python
#load packages
import sys #access to system parameters https://docs.python.org/3/library/sys.html
print("Python version: {}". format(sys.version))
import pandas as pd #collection of functions for data processing and analysis modeled after R dataframes with SQL like features
print("pandas version: {}". format(pd.__version__))
import matplotlib #collection of functions for scientific and publication-ready visualization
print("matplotlib version: {}". format(matplotlib.__version__))
import numpy as np #foundational package for scientific computing
print("NumPy version: {}". format(np.__version__))
import scipy as sp #collection of functions for scientific computing and advance mathematics
print("SciPy version: {}". format(sp.__version__))
import IPython
from IPython import display #pretty printing of dataframes in Jupyter notebook
print("IPython version: {}". format(IPython.__version__))
import sklearn #collection of machine learning algorithms
print("scikit-learn version: {}". format(sklearn.__version__))
#misc libraries
import random
import time
#ignore warnings
import warnings
warnings.filterwarnings('ignore')
print('-'*25)
# Input data files are available in the "../input/" directory.
# For example, running this (by clicking run or pressing Shift+Enter) will list the files in the input directory
from subprocess import check_output
print(check_output(["ls", "../input"]).decode("utf8"))
# Any results you write to the current directory are saved as output.
#Common Model Algorithms
from sklearn import svm, tree, linear_model, neighbors, naive_bayes, ensemble, discriminant_analysis, gaussian_process
from xgboost import XGBClassifier
#Common Model Helpers
from sklearn.preprocessing import OneHotEncoder, LabelEncoder
from sklearn import feature_selection
from sklearn import model_selection
from sklearn import metrics
#Visualization
import matplotlib as mpl
import matplotlib.pyplot as plt
import matplotlib.pylab as pylab
import seaborn as sns
# from pandas.tools.plotting import scatter_matrix
from pandas import plotting
#Configure Visualization Defaults
#%matplotlib inline = show plots in Jupyter Notebook browser
%matplotlib inline
mpl.style.use('ggplot')
sns.set_style('white')
pylab.rcParams['figure.figsize'] = 12,8
#import data from file: https://pandas.pydata.org/pandas-docs/stable/generated/pandas.read_csv.html
data_raw = pd.read_csv('/kaggle/input/titanic//train.csv')
#a dataset should be broken into 3 splits: train, test, and (final) validation
#the test file provided is the validation file for competition submission
#we will split the train set into train and test data in future sections
data_val = pd.read_csv('/kaggle/input/titanic//test.csv')
#to play with our data we'll create a copy
#remember python assignment or equal passes by reference vs values, so we use the copy function: https://stackoverflow.com/questions/46327494/python-pandas-dataframe-copydeep-false-vs-copydeep-true-vs
data1 = data_raw.copy(deep = True)
#however passing by reference is convenient, because we can clean both datasets at once
data_cleaner = [data1, data_val]
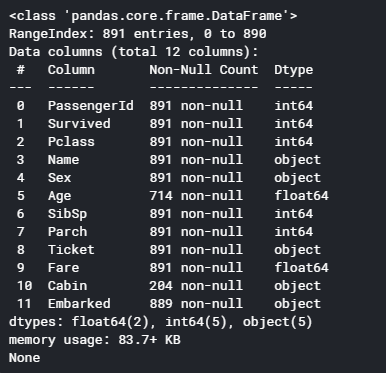
#preview data
print (data_raw.info()) #https://pandas.pydata.org/pandas-docs/stable/generated/pandas.DataFrame.info.html
data_raw.sample(10) #https://pandas.pydata.org/pandas-docs/stable/generated/pandas.DataFrame.sample.html
print('Train columns with null values:\n', data1.isnull().sum())
print("-"*10)
print('Test/Validation columns with null values:\n', data_val.isnull().sum())
print("-"*10)
data_raw.describe(include = 'all')
###COMPLETING: complete or delete missing values in train and test/validation dataset
for dataset in data_cleaner:
#complete missing age with median
dataset['Age'].fillna(dataset['Age'].median(), inplace = True)
#complete embarked with mode
dataset['Embarked'].fillna(dataset['Embarked'].mode()[0], inplace = True)
#complete missing fare with median
dataset['Fare'].fillna(dataset['Fare'].median(), inplace = True)
#delete the cabin feature/column and others previously stated to exclude in train dataset
drop_column = ['PassengerId','Cabin', 'Ticket']
data1.drop(drop_column, axis=1, inplace = True)
print(data1.isnull().sum())
print("-"*10)
print(data_val.isnull().sum())
###CREATE: Feature Engineering for train and test/validation dataset
for dataset in data_cleaner:
#Discrete variables
dataset['FamilySize'] = dataset ['SibSp'] + dataset['Parch'] + 1
dataset['IsAlone'] = 1 #initialize to yes/1 is alone
dataset['IsAlone'].loc[dataset['FamilySize'] > 1] = 0 # now update to no/0 if family size is greater than 1
#quick and dirty code split title from name: http://www.pythonforbeginners.com/dictionary/python-split
dataset['Title'] = dataset['Name'].str.split(", ", expand=True)[1].str.split(".", expand=True)[0]
#Continuous variable bins; qcut vs cut: https://stackoverflow.com/questions/30211923/what-is-the-difference-between-pandas-qcut-and-pandas-cut
#Fare Bins/Buckets using qcut or frequency bins: https://pandas.pydata.org/pandas-docs/stable/generated/pandas.qcut.html
dataset['FareBin'] = pd.qcut(dataset['Fare'], 4)
#Age Bins/Buckets using cut or value bins: https://pandas.pydata.org/pandas-docs/stable/generated/pandas.cut.html
dataset['AgeBin'] = pd.cut(dataset['Age'].astype(int), 5)
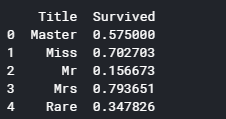
#cleanup rare title names
#print(data1['Title'].value_counts())
stat_min = 10 #while small is arbitrary, we'll use the common minimum in statistics: http://nicholasjjackson.com/2012/03/08/sample-size-is-10-a-magic-number/
title_names = (data1['Title'].value_counts() < stat_min) #this will create a true false series with title name as index
#apply and lambda functions are quick and dirty code to find and replace with fewer lines of code: https://community.modeanalytics.com/python/tutorial/pandas-groupby-and-python-lambda-functions/
data1['Title'] = data1['Title'].apply(lambda x: 'Misc' if title_names.loc[x] == True else x)
print(data1['Title'].value_counts())
print("-"*10)
#preview data again
data1.info()
data_val.info()
data1.sample(10)
#CONVERT: convert objects to category using Label Encoder for train and test/validation dataset
#code categorical data
label = LabelEncoder()
for dataset in data_cleaner:
dataset['Sex_Code'] = label.fit_transform(dataset['Sex'])
dataset['Embarked_Code'] = label.fit_transform(dataset['Embarked'])
dataset['Title_Code'] = label.fit_transform(dataset['Title'])
dataset['AgeBin_Code'] = label.fit_transform(dataset['AgeBin'])
dataset['FareBin_Code'] = label.fit_transform(dataset['FareBin'])
#define y variable aka target/outcome
Target = ['Survived']
#define x variables for original features aka feature selection
data1_x = ['Sex','Pclass', 'Embarked', 'Title','SibSp', 'Parch', 'Age', 'Fare', 'FamilySize', 'IsAlone'] #pretty name/values for charts
data1_x_calc = ['Sex_Code','Pclass', 'Embarked_Code', 'Title_Code','SibSp', 'Parch', 'Age', 'Fare'] #coded for algorithm calculation
data1_xy = Target + data1_x
print('Original X Y: ', data1_xy, '\n')
#define x variables for original w/bin features to remove continuous variables
data1_x_bin = ['Sex_Code','Pclass', 'Embarked_Code', 'Title_Code', 'FamilySize', 'AgeBin_Code', 'FareBin_Code']
data1_xy_bin = Target + data1_x_bin
print('Bin X Y: ', data1_xy_bin, '\n')
#define x and y variables for dummy features original
data1_dummy = pd.get_dummies(data1[data1_x])
data1_x_dummy = data1_dummy.columns.tolist()
data1_xy_dummy = Target + data1_x_dummy
print('Dummy X Y: ', data1_xy_dummy, '\n')
data1_dummy.head()
print('Train columns with null values: \n', data1.isnull().sum())
print("-"*10)
print (data1.info())
print("-"*10)
print('Test/Validation columns with null values: \n', data_val.isnull().sum())
print("-"*10)
print (data_val.info())
print("-"*10)
data_raw.describe(include = 'all')
#split train and test data with function defaults
#random_state -> seed or control random number generator: https://www.quora.com/What-is-seed-in-random-number-generation
train1_x, test1_x, train1_y, test1_y = model_selection.train_test_split(data1[data1_x_calc], data1[Target], random_state = 0)
train1_x_bin, test1_x_bin, train1_y_bin, test1_y_bin = model_selection.train_test_split(data1[data1_x_bin], data1[Target] , random_state = 0)
train1_x_dummy, test1_x_dummy, train1_y_dummy, test1_y_dummy = model_selection.train_test_split(data1_dummy[data1_x_dummy], data1[Target], random_state = 0)
print("Data1 Shape: {}".format(data1.shape))
print("Train1 Shape: {}".format(train1_x.shape))
print("Test1 Shape: {}".format(test1_x.shape))
train1_x_bin.head()
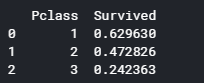
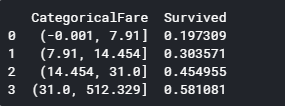
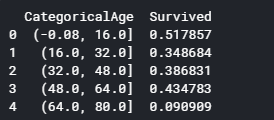
#Discrete Variable Correlation by Survival using
#group by aka pivot table: https://pandas.pydata.org/pandas-docs/stable/generated/pandas.DataFrame.groupby.html
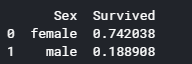
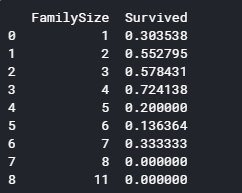
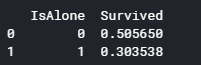
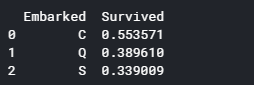
for x in data1_x:
if data1[x].dtype != 'float64' :
print('Survival Correlation by:', x)
print(data1[[x, Target[0]]].groupby(x, as_index=False).mean())
print('-'*10, '\n')
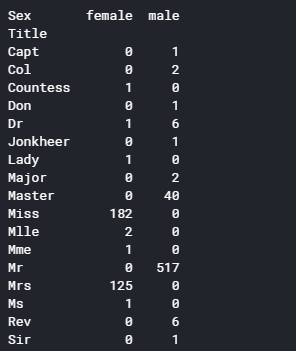
#using crosstabs: https://pandas.pydata.org/pandas-docs/stable/generated/pandas.crosstab.html
print(pd.crosstab(data1['Title'],data1[Target[0]]))
#IMPORTANT: Intentionally plotted different ways for learning purposes only.
#optional plotting w/pandas: https://pandas.pydata.org/pandas-docs/stable/visualization.html
#we will use matplotlib.pyplot: https://matplotlib.org/api/pyplot_api.html
#to organize our graphics will use figure: https://matplotlib.org/api/_as_gen/matplotlib.pyplot.figure.html#matplotlib.pyplot.figure
#subplot: https://matplotlib.org/api/_as_gen/matplotlib.pyplot.subplot.html#matplotlib.pyplot.subplot
#and subplotS: https://matplotlib.org/api/_as_gen/matplotlib.pyplot.subplots.html?highlight=matplotlib%20pyplot%20subplots#matplotlib.pyplot.subplots
#graph distribution of quantitative data
plt.figure(figsize=[16,12])
plt.subplot(231)
plt.boxplot(x=data1['Fare'], showmeans = True, meanline = True)
plt.title('Fare Boxplot')
plt.ylabel('Fare ($)')
plt.subplot(232)
plt.boxplot(data1['Age'], showmeans = True, meanline = True)
plt.title('Age Boxplot')
plt.ylabel('Age (Years)')
plt.subplot(233)
plt.boxplot(data1['FamilySize'], showmeans = True, meanline = True)
plt.title('Family Size Boxplot')
plt.ylabel('Family Size (#)')
plt.subplot(234)
plt.hist(x = [data1[data1['Survived']==1]['Fare'], data1[data1['Survived']==0]['Fare']],
stacked=True, color = ['g','r'],label = ['Survived','Dead'])
plt.title('Fare Histogram by Survival')
plt.xlabel('Fare ($)')
plt.ylabel('# of Passengers')
plt.legend()
plt.subplot(235)
plt.hist(x = [data1[data1['Survived']==1]['Age'], data1[data1['Survived']==0]['Age']],
stacked=True, color = ['g','r'],label = ['Survived','Dead'])
plt.title('Age Histogram by Survival')
plt.xlabel('Age (Years)')
plt.ylabel('# of Passengers')
plt.legend()
plt.subplot(236)
plt.hist(x = [data1[data1['Survived']==1]['FamilySize'], data1[data1['Survived']==0]['FamilySize']],
stacked=True, color = ['g','r'],label = ['Survived','Dead'])
plt.title('Family Size Histogram by Survival')
plt.xlabel('Family Size (#)')
plt.ylabel('# of Passengers')
plt.legend()
#we will use seaborn graphics for multi-variable comparison: https://seaborn.pydata.org/api.html
#graph individual features by survival
fig, saxis = plt.subplots(2, 3,figsize=(16,12))
sns.barplot(x = 'Embarked', y = 'Survived', data=data1, ax = saxis[0,0])
sns.barplot(x = 'Pclass', y = 'Survived', order=[1,2,3], data=data1, ax = saxis[0,1])
sns.barplot(x = 'IsAlone', y = 'Survived', order=[1,0], data=data1, ax = saxis[0,2])
sns.pointplot(x = 'FareBin', y = 'Survived', data=data1, ax = saxis[1,0])
sns.pointplot(x = 'AgeBin', y = 'Survived', data=data1, ax = saxis[1,1])
sns.pointplot(x = 'FamilySize', y = 'Survived', data=data1, ax = saxis[1,2])
#graph distribution of qualitative data: Pclass
#we know class mattered in survival, now let's compare class and a 2nd feature
fig, (axis1,axis2,axis3) = plt.subplots(1,3,figsize=(14,12))
sns.boxplot(x = 'Pclass', y = 'Fare', hue = 'Survived', data = data1, ax = axis1)
axis1.set_title('Pclass vs Fare Survival Comparison')
sns.violinplot(x = 'Pclass', y = 'Age', hue = 'Survived', data = data1, split = True, ax = axis2)
axis2.set_title('Pclass vs Age Survival Comparison')
sns.boxplot(x = 'Pclass', y ='FamilySize', hue = 'Survived', data = data1, ax = axis3)
axis3.set_title('Pclass vs Family Size Survival Comparison')
#graph distribution of qualitative data: Sex
#we know sex mattered in survival, now let's compare sex and a 2nd feature
fig, qaxis = plt.subplots(1,3,figsize=(14,12))
sns.barplot(x = 'Sex', y = 'Survived', hue = 'Embarked', data=data1, ax = qaxis[0])
axis1.set_title('Sex vs Embarked Survival Comparison')
sns.barplot(x = 'Sex', y = 'Survived', hue = 'Pclass', data=data1, ax = qaxis[1])
axis1.set_title('Sex vs Pclass Survival Comparison')
sns.barplot(x = 'Sex', y = 'Survived', hue = 'IsAlone', data=data1, ax = qaxis[2])
axis1.set_title('Sex vs IsAlone Survival Comparison')
#more side-by-side comparisons
fig, (maxis1, maxis2) = plt.subplots(1, 2,figsize=(14,12))
#how does family size factor with sex & survival compare
sns.pointplot(x="FamilySize", y="Survived", hue="Sex", data=data1,
palette={"male": "blue", "female": "pink"},
markers=["*", "o"], linestyles=["-", "--"], ax = maxis1)
#how does class factor with sex & survival compare
sns.pointplot(x="Pclass", y="Survived", hue="Sex", data=data1,
palette={"male": "blue", "female": "pink"},
markers=["*", "o"], linestyles=["-", "--"], ax = maxis2)
#how does embark port factor with class, sex, and survival compare
#facetgrid: https://seaborn.pydata.org/generated/seaborn.FacetGrid.html
e = sns.FacetGrid(data1, col = 'Embarked')
e.map(sns.pointplot, 'Pclass', 'Survived', 'Sex', ci=95.0, palette = 'deep')
e.add_legend()
#plot distributions of age of passengers who survived or did not survive
a = sns.FacetGrid( data1, hue = 'Survived', aspect=4 )
a.map(sns.kdeplot, 'Age', shade= True )
a.set(xlim=(0 , data1['Age'].max()))
a.add_legend()
#histogram comparison of sex, class, and age by survival
h = sns.FacetGrid(data1, row = 'Sex', col = 'Pclass', hue = 'Survived')
h.map(plt.hist, 'Age', alpha = .75)
h.add_legend()
#pair plots of entire dataset
pp = sns.pairplot(data1, hue = 'Survived', palette = 'deep', size=1.2, diag_kind = 'kde', diag_kws=dict(shade=True), plot_kws=dict(s=10) )
pp.set(xticklabels=[])
#correlation heatmap of dataset
def correlation_heatmap(df):
_ , ax = plt.subplots(figsize =(14, 12))
colormap = sns.diverging_palette(220, 10, as_cmap = True)
_ = sns.heatmap(
df.corr(),
cmap = colormap,
square=True,
cbar_kws={'shrink':.9 },
ax=ax,
annot=True,
linewidths=0.1,vmax=1.0, linecolor='white',
annot_kws={'fontsize':12 }
)
plt.title('Pearson Correlation of Features', y=1.05, size=15)
correlation_heatmap(data1)
#Machine Learning Algorithm (MLA) Selection and Initialization
MLA = [
#Ensemble Methods
ensemble.AdaBoostClassifier(),
ensemble.BaggingClassifier(),
ensemble.ExtraTreesClassifier(),
ensemble.GradientBoostingClassifier(),
ensemble.RandomForestClassifier(),
#Gaussian Processes
gaussian_process.GaussianProcessClassifier(),
#GLM
linear_model.LogisticRegressionCV(),
linear_model.PassiveAggressiveClassifier(),
linear_model.RidgeClassifierCV(),
linear_model.SGDClassifier(),
linear_model.Perceptron(),
#Navies Bayes
naive_bayes.BernoulliNB(),
naive_bayes.GaussianNB(),
#Nearest Neighbor
neighbors.KNeighborsClassifier(),
#SVM
svm.SVC(probability=True),
svm.NuSVC(probability=True),
svm.LinearSVC(),
#Trees
tree.DecisionTreeClassifier(),
tree.ExtraTreeClassifier(),
#Discriminant Analysis
discriminant_analysis.LinearDiscriminantAnalysis(),
discriminant_analysis.QuadraticDiscriminantAnalysis(),
#xgboost: http://xgboost.readthedocs.io/en/latest/model.html
XGBClassifier()
]
#split dataset in cross-validation with this splitter class: http://scikit-learn.org/stable/modules/generated/sklearn.model_selection.ShuffleSplit.html#sklearn.model_selection.ShuffleSplit
#note: this is an alternative to train_test_split
cv_split = model_selection.ShuffleSplit(n_splits = 10, test_size = .3, train_size = .6, random_state = 0 ) # run model 10x with 60/30 split intentionally leaving out 10%
#create table to compare MLA metrics
MLA_columns = ['MLA Name', 'MLA Parameters','MLA Train Accuracy Mean', 'MLA Test Accuracy Mean', 'MLA Test Accuracy 3*STD' ,'MLA Time']
MLA_compare = pd.DataFrame(columns = MLA_columns)
#create table to compare MLA predictions
MLA_predict = data1[Target]
#index through MLA and save performance to table
row_index = 0
for alg in MLA:
#set name and parameters
MLA_name = alg.__class__.__name__
MLA_compare.loc[row_index, 'MLA Name'] = MLA_name
MLA_compare.loc[row_index, 'MLA Parameters'] = str(alg.get_params())
#score model with cross validation: http://scikit-learn.org/stable/modules/generated/sklearn.model_selection.cross_validate.html#sklearn.model_selection.cross_validate
cv_results = model_selection.cross_validate(alg, data1[data1_x_bin], data1[Target], cv = cv_split)
MLA_compare.loc[row_index, 'MLA Time'] = cv_results['fit_time'].mean()
# MLA_compare.loc[row_index, 'MLA Train Accuracy Mean'] = cv_results['train_score'].mean()
MLA_compare.loc[row_index, 'MLA Test Accuracy Mean'] = cv_results['test_score'].mean()
#if this is a non-bias random sample, then +/-3 standard deviations (std) from the mean, should statistically capture 99.7% of the subsets
MLA_compare.loc[row_index, 'MLA Test Accuracy 3*STD'] = cv_results['test_score'].std()*3 #let's know the worst that can happen!
#save MLA predictions - see section 6 for usage
alg.fit(data1[data1_x_bin], data1[Target])
MLA_predict[MLA_name] = alg.predict(data1[data1_x_bin])
row_index+=1
#print and sort table: https://pandas.pydata.org/pandas-docs/stable/generated/pandas.DataFrame.sort_values.html
MLA_compare.sort_values(by = ['MLA Test Accuracy Mean'], ascending = False, inplace = True)
MLA_compare
#MLA_predict
#barplot using https://seaborn.pydata.org/generated/seaborn.barplot.html
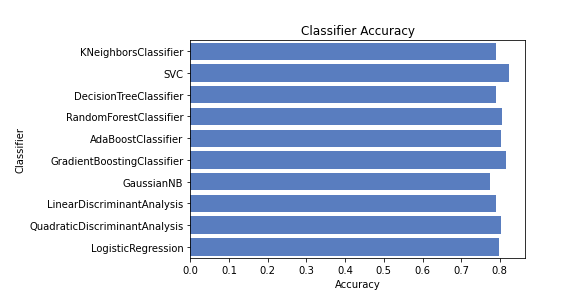
sns.barplot(x='MLA Test Accuracy Mean', y = 'MLA Name', data = MLA_compare, color = 'm')
#prettify using pyplot: https://matplotlib.org/api/pyplot_api.html
plt.title('Machine Learning Algorithm Accuracy Score \n')
plt.xlabel('Accuracy Score (%)')
plt.ylabel('Algorithm')
#IMPORTANT: This is a handmade model for learning purposes only.
#However, it is possible to create your own predictive model without a fancy algorithm :)
#coin flip model with random 1/survived 0/died
#iterate over dataFrame rows as (index, Series) pairs: https://pandas.pydata.org/pandas-docs/stable/generated/pandas.DataFrame.iterrows.html
for index, row in data1.iterrows():
#random number generator: https://docs.python.org/2/library/random.html
if random.random() > .5: # Random float x, 0.0 <= x < 1.0
#data1.set_value(index, 'Random_Predict', 1) #predict survived/1
data1.at[index, 'Random_Predict']= 1 #predict survived/1
else:
#data1.set_value(index, 'Random_Predict', 0) #predict died/0
data1.at[index, 'Random_Predict']= 0 #predict died/0
#score random guess of survival. Use shortcut 1 = Right Guess and 0 = Wrong Guess
#the mean of the column will then equal the accuracy
data1['Random_Score'] = 0 #assume prediction wrong
data1.loc[(data1['Survived'] == data1['Random_Predict']), 'Random_Score'] = 1 #set to 1 for correct prediction
print('Coin Flip Model Accuracy: {:.2f}%'.format(data1['Random_Score'].mean()*100))
#we can also use scikit's accuracy_score function to save us a few lines of code
#http://scikit-learn.org/stable/modules/generated/sklearn.metrics.accuracy_score.html#sklearn.metrics.accuracy_score
print('Coin Flip Model Accuracy w/SciKit: {:.2f}%'.format(metrics.accuracy_score(data1['Survived'], data1['Random_Predict'])*100))
#group by or pivot table: https://pandas.pydata.org/pandas-docs/stable/generated/pandas.DataFrame.groupby.html
pivot_female = data1[data1.Sex=='female'].groupby(['Sex','Pclass', 'Embarked','FareBin'])['Survived'].mean()
print('Survival Decision Tree w/Female Node: \n',pivot_female)
pivot_male = data1[data1.Sex=='male'].groupby(['Sex','Title'])['Survived'].mean()
print('\n\nSurvival Decision Tree w/Male Node: \n',pivot_male)
#handmade data model using brain power (and Microsoft Excel Pivot Tables for quick calculations)
def mytree(df):
#initialize table to store predictions
Model = pd.DataFrame(data = {'Predict':[]})
male_title = ['Master'] #survived titles
for index, row in df.iterrows():
#Question 1: Were you on the Titanic; majority died
Model.loc[index, 'Predict'] = 0
#Question 2: Are you female; majority survived
if (df.loc[index, 'Sex'] == 'female'):
Model.loc[index, 'Predict'] = 1
#Question 3A Female - Class and Question 4 Embarked gain minimum information
#Question 5B Female - FareBin; set anything less than .5 in female node decision tree back to 0
if ((df.loc[index, 'Sex'] == 'female') &
(df.loc[index, 'Pclass'] == 3) &
(df.loc[index, 'Embarked'] == 'S') &
(df.loc[index, 'Fare'] > 8)
):
Model.loc[index, 'Predict'] = 0
#Question 3B Male: Title; set anything greater than .5 to 1 for majority survived
if ((df.loc[index, 'Sex'] == 'male') &
(df.loc[index, 'Title'] in male_title)
):
Model.loc[index, 'Predict'] = 1
return Model
#model data
Tree_Predict = mytree(data1)
print('Decision Tree Model Accuracy/Precision Score: {:.2f}%\n'.format(metrics.accuracy_score(data1['Survived'], Tree_Predict)*100))
#Accuracy Summary Report with http://scikit-learn.org/stable/modules/generated/sklearn.metrics.classification_report.html#sklearn.metrics.classification_report
#Where recall score = (true positives)/(true positive + false negative) w/1 being best:http://scikit-learn.org/stable/modules/generated/sklearn.metrics.recall_score.html#sklearn.metrics.recall_score
#And F1 score = weighted average of precision and recall w/1 being best: http://scikit-learn.org/stable/modules/generated/sklearn.metrics.f1_score.html#sklearn.metrics.f1_score
print(metrics.classification_report(data1['Survived'], Tree_Predict))
#Plot Accuracy Summary
#Credit: http://scikit-learn.org/stable/auto_examples/model_selection/plot_confusion_matrix.html
import itertools
def plot_confusion_matrix(cm, classes,
normalize=False,
title='Confusion matrix',
cmap=plt.cm.Blues):
"""
This function prints and plots the confusion matrix.
Normalization can be applied by setting `normalize=True`.
"""
if normalize:
cm = cm.astype('float') / cm.sum(axis=1)[:, np.newaxis]
print("Normalized confusion matrix")
else:
print('Confusion matrix, without normalization')
print(cm)
plt.imshow(cm, interpolation='nearest', cmap=cmap)
plt.title(title)
plt.colorbar()
tick_marks = np.arange(len(classes))
plt.xticks(tick_marks, classes, rotation=45)
plt.yticks(tick_marks, classes)
fmt = '.2f' if normalize else 'd'
thresh = cm.max() / 2.
for i, j in itertools.product(range(cm.shape[0]), range(cm.shape[1])):
plt.text(j, i, format(cm[i, j], fmt),
horizontalalignment="center",
color="white" if cm[i, j] > thresh else "black")
plt.tight_layout()
plt.ylabel('True label')
plt.xlabel('Predicted label')
# Compute confusion matrix
cnf_matrix = metrics.confusion_matrix(data1['Survived'], Tree_Predict)
np.set_printoptions(precision=2)
class_names = ['Dead', 'Survived']
# Plot non-normalized confusion matrix
plt.figure()
plot_confusion_matrix(cnf_matrix, classes=class_names,
title='Confusion matrix, without normalization')
# Plot normalized confusion matrix
plt.figure()
plot_confusion_matrix(cnf_matrix, classes=class_names, normalize=True,
title='Normalized confusion matrix')
#base model
dtree = tree.DecisionTreeClassifier(random_state = 0)
base_results = model_selection.cross_validate(dtree, data1[data1_x_bin], data1[Target], cv = cv_split)
dtree.fit(data1[data1_x_bin], data1[Target])
print('BEFORE DT Parameters: ', dtree.get_params())
#print("BEFORE DT Training w/bin score mean: {:.2f}". format(base_results['train_score'].mean()*100))
print("BEFORE DT Test w/bin score mean: {:.2f}". format(base_results['test_score'].mean()*100))
print("BEFORE DT Test w/bin score 3*std: +/- {:.2f}". format(base_results['test_score'].std()*100*3))
#print("BEFORE DT Test w/bin set score min: {:.2f}". format(base_results['test_score'].min()*100))
print('-'*10)
#tune hyper-parameters: http://scikit-learn.org/stable/modules/generated/sklearn.tree.DecisionTreeClassifier.html#sklearn.tree.DecisionTreeClassifier
param_grid = {'criterion': ['gini', 'entropy'], #scoring methodology; two supported formulas for calculating information gain - default is gini
#'splitter': ['best', 'random'], #splitting methodology; two supported strategies - default is best
'max_depth': [2,4,6,8,10,None], #max depth tree can grow; default is none
#'min_samples_split': [2,5,10,.03,.05], #minimum subset size BEFORE new split (fraction is % of total); default is 2
#'min_samples_leaf': [1,5,10,.03,.05], #minimum subset size AFTER new split split (fraction is % of total); default is 1
#'max_features': [None, 'auto'], #max features to consider when performing split; default none or all
'random_state': [0] #seed or control random number generator: https://www.quora.com/What-is-seed-in-random-number-generation
}
#print(list(model_selection.ParameterGrid(param_grid)))
#choose best model with grid_search: #http://scikit-learn.org/stable/modules/grid_search.html#grid-search
#http://scikit-learn.org/stable/auto_examples/model_selection/plot_grid_search_digits.html
tune_model = model_selection.GridSearchCV(tree.DecisionTreeClassifier(), param_grid=param_grid, scoring = 'roc_auc', cv = cv_split)
tune_model.fit(data1[data1_x_bin], data1[Target])
#print(tune_model.cv_results_.keys())
#print(tune_model.cv_results_['params'])
print('AFTER DT Parameters: ', tune_model.best_params_)
#print(tune_model.cv_results_['mean_train_score'])
#print("AFTER DT Training w/bin score mean: {:.2f}". format(tune_model.cv_results_['mean_train_score'][tune_model.best_index_]*100))
#print(tune_model.cv_results_['mean_test_score'])
print("AFTER DT Test w/bin score mean: {:.2f}". format(tune_model.cv_results_['mean_test_score'][tune_model.best_index_]*100))
print("AFTER DT Test w/bin score 3*std: +/- {:.2f}". format(tune_model.cv_results_['std_test_score'][tune_model.best_index_]*100*3))
print('-'*10)
#duplicates gridsearchcv
#tune_results = model_selection.cross_validate(tune_model, data1[data1_x_bin], data1[Target], cv = cv_split)
#print('AFTER DT Parameters: ', tune_model.best_params_)
#print("AFTER DT Training w/bin set score mean: {:.2f}". format(tune_results['train_score'].mean()*100))
#print("AFTER DT Test w/bin set score mean: {:.2f}". format(tune_results['test_score'].mean()*100))
#print("AFTER DT Test w/bin set score min: {:.2f}". format(tune_results['test_score'].min()*100))
#print('-'*10)
#base model
print('BEFORE DT RFE Training Shape Old: ', data1[data1_x_bin].shape)
print('BEFORE DT RFE Training Columns Old: ', data1[data1_x_bin].columns.values)
# print("BEFORE DT RFE Training w/bin score mean: {:.2f}". format(base_results['train_score'].mean()*100))
print("BEFORE DT RFE Test w/bin score mean: {:.2f}". format(base_results['test_score'].mean()*100))
print("BEFORE DT RFE Test w/bin score 3*std: +/- {:.2f}". format(base_results['test_score'].std()*100*3))
print('-'*10)
#feature selection
dtree_rfe = feature_selection.RFECV(dtree, step = 1, scoring = 'accuracy', cv = cv_split)
dtree_rfe.fit(data1[data1_x_bin], data1[Target])
#transform x&y to reduced features and fit new model
#alternative: can use pipeline to reduce fit and transform steps: http://scikit-learn.org/stable/modules/generated/sklearn.pipeline.Pipeline.html
X_rfe = data1[data1_x_bin].columns.values[dtree_rfe.get_support()]
rfe_results = model_selection.cross_validate(dtree, data1[X_rfe], data1[Target], cv = cv_split)
#print(dtree_rfe.grid_scores_)
print('AFTER DT RFE Training Shape New: ', data1[X_rfe].shape)
print('AFTER DT RFE Training Columns New: ', X_rfe)
# print("AFTER DT RFE Training w/bin score mean: {:.2f}". format(rfe_results['train_score'].mean()*100))
print("AFTER DT RFE Test w/bin score mean: {:.2f}". format(rfe_results['test_score'].mean()*100))
print("AFTER DT RFE Test w/bin score 3*std: +/- {:.2f}". format(rfe_results['test_score'].std()*100*3))
print('-'*10)
#tune rfe model
rfe_tune_model = model_selection.GridSearchCV(tree.DecisionTreeClassifier(), param_grid=param_grid, scoring = 'roc_auc', cv = cv_split)
rfe_tune_model.fit(data1[X_rfe], data1[Target])
#print(rfe_tune_model.cv_results_.keys())
#print(rfe_tune_model.cv_results_['params'])
print('AFTER DT RFE Tuned Parameters: ', rfe_tune_model.best_params_)
#print(rfe_tune_model.cv_results_['mean_train_score'])
# print("AFTER DT RFE Tuned Training w/bin score mean: {:.2f}". format(rfe_tune_model.cv_results_['mean_train_score'][tune_model.best_index_]*100))
#print(rfe_tune_model.cv_results_['mean_test_score'])
print("AFTER DT RFE Tuned Test w/bin score mean: {:.2f}". format(rfe_tune_model.cv_results_['mean_test_score'][tune_model.best_index_]*100))
print("AFTER DT RFE Tuned Test w/bin score 3*std: +/- {:.2f}". format(rfe_tune_model.cv_results_['std_test_score'][tune_model.best_index_]*100*3))
print('-'*10)
#Graph MLA version of Decision Tree: http://scikit-learn.org/stable/modules/generated/sklearn.tree.export_graphviz.html
import graphviz
dot_data = tree.export_graphviz(dtree, out_file=None,
feature_names = data1_x_bin, class_names = True,
filled = True, rounded = True)
graph = graphviz.Source(dot_data)
graph
#compare algorithm predictions with each other, where 1 = exactly similar and 0 = exactly opposite
#there are some 1's, but enough blues and light reds to create a "super algorithm" by combining them
correlation_heatmap(MLA_predict)
#why choose one model, when you can pick them all with voting classifier
#http://scikit-learn.org/stable/modules/generated/sklearn.ensemble.VotingClassifier.html
#removed models w/o attribute 'predict_proba' required for vote classifier and models with a 1.0 correlation to another model
vote_est = [
#Ensemble Methods: http://scikit-learn.org/stable/modules/ensemble.html
('ada', ensemble.AdaBoostClassifier()),
('bc', ensemble.BaggingClassifier()),
('etc',ensemble.ExtraTreesClassifier()),
('gbc', ensemble.GradientBoostingClassifier()),
('rfc', ensemble.RandomForestClassifier()),
#Gaussian Processes: http://scikit-learn.org/stable/modules/gaussian_process.html#gaussian-process-classification-gpc
('gpc', gaussian_process.GaussianProcessClassifier()),
#GLM: http://scikit-learn.org/stable/modules/linear_model.html#logistic-regression
('lr', linear_model.LogisticRegressionCV()),
#Navies Bayes: http://scikit-learn.org/stable/modules/naive_bayes.html
('bnb', naive_bayes.BernoulliNB()),
('gnb', naive_bayes.GaussianNB()),
#Nearest Neighbor: http://scikit-learn.org/stable/modules/neighbors.html
('knn', neighbors.KNeighborsClassifier()),
#SVM: http://scikit-learn.org/stable/modules/svm.html
('svc', svm.SVC(probability=True)),
#xgboost: http://xgboost.readthedocs.io/en/latest/model.html
('xgb', XGBClassifier())
]
#Hard Vote or majority rules
vote_hard = ensemble.VotingClassifier(estimators = vote_est , voting = 'hard')
vote_hard_cv = model_selection.cross_validate(vote_hard, data1[data1_x_bin], data1[Target], cv = cv_split)
vote_hard.fit(data1[data1_x_bin], data1[Target])
# print("Hard Voting Training w/bin score mean: {:.2f}". format(vote_hard_cv['train_score'].mean()*100))
print("Hard Voting Test w/bin score mean: {:.2f}". format(vote_hard_cv['test_score'].mean()*100))
print("Hard Voting Test w/bin score 3*std: +/- {:.2f}". format(vote_hard_cv['test_score'].std()*100*3))
print('-'*10)
#Soft Vote or weighted probabilities
vote_soft = ensemble.VotingClassifier(estimators = vote_est , voting = 'soft')
vote_soft_cv = model_selection.cross_validate(vote_soft, data1[data1_x_bin], data1[Target], cv = cv_split)
vote_soft.fit(data1[data1_x_bin], data1[Target])
# print("Soft Voting Training w/bin score mean: {:.2f}". format(vote_soft_cv['train_score'].mean()*100))
print("Soft Voting Test w/bin score mean: {:.2f}". format(vote_soft_cv['test_score'].mean()*100))
print("Soft Voting Test w/bin score 3*std: +/- {:.2f}". format(vote_soft_cv['test_score'].std()*100*3))
print('-'*10)
#WARNING: Running is very computational intensive and time expensive.
#Code is written for experimental/developmental purposes and not production ready!
#Hyperparameter Tune with GridSearchCV: http://scikit-learn.org/stable/modules/generated/sklearn.model_selection.GridSearchCV.html
grid_n_estimator = [10, 50, 100, 300]
grid_ratio = [.1, .25, .5, .75, 1.0]
grid_learn = [.01, .03, .05, .1, .25]
grid_max_depth = [2, 4, 6, 8, 10, None]
grid_min_samples = [5, 10, .03, .05, .10]
grid_criterion = ['gini', 'entropy']
grid_bool = [True, False]
grid_seed = [0]
grid_param = [
[{
#AdaBoostClassifier - http://scikit-learn.org/stable/modules/generated/sklearn.ensemble.AdaBoostClassifier.html
'n_estimators': grid_n_estimator, #default=50
'learning_rate': grid_learn, #default=1
#'algorithm': ['SAMME', 'SAMME.R'], #default=’SAMME.R
'random_state': grid_seed
}],
[{
#BaggingClassifier - http://scikit-learn.org/stable/modules/generated/sklearn.ensemble.BaggingClassifier.html#sklearn.ensemble.BaggingClassifier
'n_estimators': grid_n_estimator, #default=10
'max_samples': grid_ratio, #default=1.0
'random_state': grid_seed
}],
[{
#ExtraTreesClassifier - http://scikit-learn.org/stable/modules/generated/sklearn.ensemble.ExtraTreesClassifier.html#sklearn.ensemble.ExtraTreesClassifier
'n_estimators': grid_n_estimator, #default=10
'criterion': grid_criterion, #default=”gini”
'max_depth': grid_max_depth, #default=None
'random_state': grid_seed
}],
[{
#GradientBoostingClassifier - http://scikit-learn.org/stable/modules/generated/sklearn.ensemble.GradientBoostingClassifier.html#sklearn.ensemble.GradientBoostingClassifier
#'loss': ['deviance', 'exponential'], #default=’deviance’
'learning_rate': [.05], #default=0.1 -- 12/31/17 set to reduce runtime -- The best parameter for GradientBoostingClassifier is {'learning_rate': 0.05, 'max_depth': 2, 'n_estimators': 300, 'random_state': 0} with a runtime of 264.45 seconds.
'n_estimators': [300], #default=100 -- 12/31/17 set to reduce runtime -- The best parameter for GradientBoostingClassifier is {'learning_rate': 0.05, 'max_depth': 2, 'n_estimators': 300, 'random_state': 0} with a runtime of 264.45 seconds.
#'criterion': ['friedman_mse', 'mse', 'mae'], #default=”friedman_mse”
'max_depth': grid_max_depth, #default=3
'random_state': grid_seed
}],
[{
#RandomForestClassifier - http://scikit-learn.org/stable/modules/generated/sklearn.ensemble.RandomForestClassifier.html#sklearn.ensemble.RandomForestClassifier
'n_estimators': grid_n_estimator, #default=10
'criterion': grid_criterion, #default=”gini”
'max_depth': grid_max_depth, #default=None
'oob_score': [True], #default=False -- 12/31/17 set to reduce runtime -- The best parameter for RandomForestClassifier is {'criterion': 'entropy', 'max_depth': 6, 'n_estimators': 100, 'oob_score': True, 'random_state': 0} with a runtime of 146.35 seconds.
'random_state': grid_seed
}],
[{
#GaussianProcessClassifier
'max_iter_predict': grid_n_estimator, #default: 100
'random_state': grid_seed
}],
[{
#LogisticRegressionCV - http://scikit-learn.org/stable/modules/generated/sklearn.linear_model.LogisticRegressionCV.html#sklearn.linear_model.LogisticRegressionCV
'fit_intercept': grid_bool, #default: True
#'penalty': ['l1','l2'],
'solver': ['newton-cg', 'lbfgs', 'liblinear', 'sag', 'saga'], #default: lbfgs
'random_state': grid_seed
}],
[{
#BernoulliNB - http://scikit-learn.org/stable/modules/generated/sklearn.naive_bayes.BernoulliNB.html#sklearn.naive_bayes.BernoulliNB
'alpha': grid_ratio, #default: 1.0
}],
#GaussianNB -
[{}],
[{
#KNeighborsClassifier - http://scikit-learn.org/stable/modules/generated/sklearn.neighbors.KNeighborsClassifier.html#sklearn.neighbors.KNeighborsClassifier
'n_neighbors': [1,2,3,4,5,6,7], #default: 5
'weights': ['uniform', 'distance'], #default = ‘uniform’
'algorithm': ['auto', 'ball_tree', 'kd_tree', 'brute']
}],
[{
#SVC - http://scikit-learn.org/stable/modules/generated/sklearn.svm.SVC.html#sklearn.svm.SVC
#http://blog.hackerearth.com/simple-tutorial-svm-parameter-tuning-python-r
#'kernel': ['linear', 'poly', 'rbf', 'sigmoid'],
'C': [1,2,3,4,5], #default=1.0
'gamma': grid_ratio, #edfault: auto
'decision_function_shape': ['ovo', 'ovr'], #default:ovr
'probability': [True],
'random_state': grid_seed
}],
[{
#XGBClassifier - http://xgboost.readthedocs.io/en/latest/parameter.html
'learning_rate': grid_learn, #default: .3
'max_depth': [1,2,4,6,8,10], #default 2
'n_estimators': grid_n_estimator,
'seed': grid_seed
}]
]
start_total = time.perf_counter() #https://docs.python.org/3/library/time.html#time.perf_counter
for clf, param in zip (vote_est, grid_param): #https://docs.python.org/3/library/functions.html#zip
#print(clf[1]) #vote_est is a list of tuples, index 0 is the name and index 1 is the algorithm
#print(param)
start = time.perf_counter()
best_search = model_selection.GridSearchCV(estimator = clf[1], param_grid = param, cv = cv_split, scoring = 'roc_auc')
best_search.fit(data1[data1_x_bin], data1[Target])
run = time.perf_counter() - start
best_param = best_search.best_params_
print('The best parameter for {} is {} with a runtime of {:.2f} seconds.'.format(clf[1].__class__.__name__, best_param, run))
clf[1].set_params(**best_param)
run_total = time.perf_counter() - start_total
print('Total optimization time was {:.2f} minutes.'.format(run_total/60))
print('-'*10)
#Hard Vote or majority rules w/Tuned Hyperparameters
grid_hard = ensemble.VotingClassifier(estimators = vote_est , voting = 'hard')
grid_hard_cv = model_selection.cross_validate(grid_hard, data1[data1_x_bin], data1[Target], cv = cv_split)
grid_hard.fit(data1[data1_x_bin], data1[Target])
# print("Hard Voting w/Tuned Hyperparameters Training w/bin score mean: {:.2f}". format(grid_hard_cv['train_score'].mean()*100))
print("Hard Voting w/Tuned Hyperparameters Test w/bin score mean: {:.2f}". format(grid_hard_cv['test_score'].mean()*100))
print("Hard Voting w/Tuned Hyperparameters Test w/bin score 3*std: +/- {:.2f}". format(grid_hard_cv['test_score'].std()*100*3))
print('-'*10)
#Soft Vote or weighted probabilities w/Tuned Hyperparameters
grid_soft = ensemble.VotingClassifier(estimators = vote_est , voting = 'soft')
grid_soft_cv = model_selection.cross_validate(grid_soft, data1[data1_x_bin], data1[Target], cv = cv_split)
grid_soft.fit(data1[data1_x_bin], data1[Target])
# print("Soft Voting w/Tuned Hyperparameters Training w/bin score mean: {:.2f}". format(grid_soft_cv['train_score'].mean()*100))
print("Soft Voting w/Tuned Hyperparameters Test w/bin score mean: {:.2f}". format(grid_soft_cv['test_score'].mean()*100))
print("Soft Voting w/Tuned Hyperparameters Test w/bin score 3*std: +/- {:.2f}". format(grid_soft_cv['test_score'].std()*100*3))
print('-'*10)
#prepare data for modeling
print(data_val.info())
print("-"*10)
#data_val.sample(10)
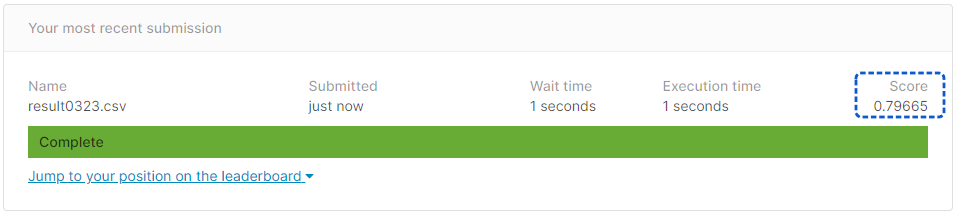
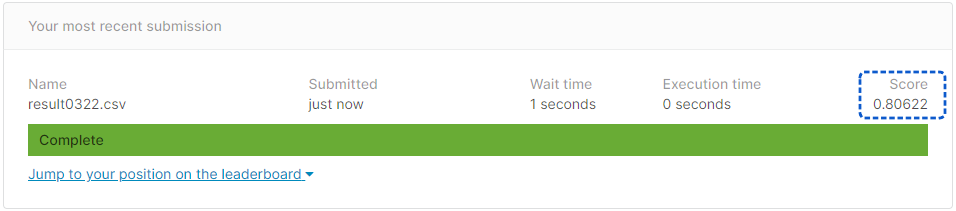
#handmade decision tree - submission score = 0.77990
data_val['Survived'] = mytree(data_val).astype(int)
data_val['Survived'] = grid_hard.predict(data_val[data1_x_bin])
#submit file
submit = data_val[['PassengerId','Survived']]
submit.to_csv("submit.csv", index=False)
print('Validation Data Distribution: \n', data_val['Survived'].value_counts(normalize = True))
submit.sample(10)
|