前回記事で山超えのコースを学習・攻略しようとしましたが、うまく学習できませんでした。
[橋を渡るコースを山でふさいだマップイメージ]
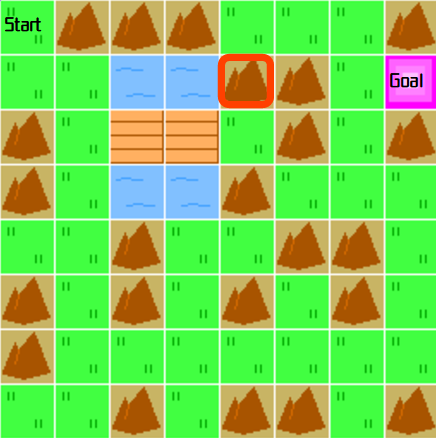
今回は、学習率と報酬を調整してマップ攻略を目指します。
学習率と報酬の調整
学習率と報酬をいろいろと変更してみて、最終的には下記のように設定し攻略することができました。
- 学習率を1に設定(train6.py 25行目のlearning_rateオプションで設定)
- ゴール時の報酬を2000に変更(env6.py 92行目を修正)
[ソース]
1 | # 警告を非表示 |
実行結果(ログ)は以下のようになります。
[実行結果]
--------------------------------- | explained_variance | 2.03e-06 | | fps | 31 | | nupdates | 1 | | policy_entropy | 1.39 | | policy_loss | -406 | | total_timesteps | 20 | | value_loss | 1.37e+05 | --------------------------------- --------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -322 | | explained_variance | 0 | | fps | 948 | | nupdates | 100 | | policy_entropy | 0.0541 | | policy_loss | -0.00449 | | total_timesteps | 2000 | | value_loss | 0.218 | --------------------------------- --------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -258 | | explained_variance | 0.00392 | | fps | 1099 | | nupdates | 200 | | policy_entropy | 0.388 | | policy_loss | -0.0641 | | total_timesteps | 4000 | | value_loss | 0.0191 | --------------------------------- --------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -269 | | explained_variance | -0.0365 | | fps | 1158 | | nupdates | 300 | | policy_entropy | 1.35 | | policy_loss | -0.052 | | total_timesteps | 6000 | | value_loss | 0.002 | --------------------------------- --------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -409 | | explained_variance | -4.18 | | fps | 1188 | | nupdates | 400 | | policy_entropy | 1.35 | | policy_loss | -0.00553 | | total_timesteps | 8000 | | value_loss | 5.43e-05 | --------------------------------- ---------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -466 | | explained_variance | -0.000672 | | fps | 1207 | | nupdates | 500 | | policy_entropy | 1.32 | | policy_loss | -55.1 | | total_timesteps | 10000 | | value_loss | 3.66e+03 | ---------------------------------- ---------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -498 | | explained_variance | -3.39e+04 | | fps | 1219 | | nupdates | 600 | | policy_entropy | 1.31 | | policy_loss | -0.00111 | | total_timesteps | 12000 | | value_loss | 0.00047 | ---------------------------------- --------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -512 | | explained_variance | -37 | | fps | 1228 | | nupdates | 700 | | policy_entropy | 1.29 | | policy_loss | -0.0169 | | total_timesteps | 14000 | | value_loss | 3.5e-05 | --------------------------------- ---------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -512 | | explained_variance | -1.11e-05 | | fps | 1235 | | nupdates | 800 | | policy_entropy | 1.28 | | policy_loss | -57.6 | | total_timesteps | 16000 | | value_loss | 3.66e+03 | ---------------------------------- --------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -482 | | explained_variance | -7 | | fps | 1240 | | nupdates | 900 | | policy_entropy | 1.36 | | policy_loss | -0.0157 | | total_timesteps | 18000 | | value_loss | 5.22e-06 | --------------------------------- --------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -476 | | explained_variance | -4.79 | | fps | 1244 | | nupdates | 1000 | | policy_entropy | 1.32 | | policy_loss | -0.0135 | | total_timesteps | 20000 | | value_loss | 1.72e-06 | --------------------------------- --------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -490 | | explained_variance | -461 | | fps | 1246 | | nupdates | 1100 | | policy_entropy | 1.38 | | policy_loss | -0.0131 | | total_timesteps | 22000 | | value_loss | 1.42e-06 | --------------------------------- --------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -518 | | explained_variance | -20.4 | | fps | 1248 | | nupdates | 1200 | | policy_entropy | 1.38 | | policy_loss | -0.0222 | | total_timesteps | 24000 | | value_loss | 6.51e-05 | --------------------------------- --------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -531 | | explained_variance | -22.4 | | fps | 1250 | | nupdates | 1300 | | policy_entropy | 1.37 | | policy_loss | -0.015 | | total_timesteps | 26000 | | value_loss | 2.2e-06 | --------------------------------- --------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -480 | | explained_variance | -0.00395 | | fps | 1251 | | nupdates | 1400 | | policy_entropy | 1.34 | | policy_loss | -79.9 | | total_timesteps | 28000 | | value_loss | 5.28e+03 | --------------------------------- --------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -450 | | explained_variance | -3.2 | | fps | 1252 | | nupdates | 1500 | | policy_entropy | 1.3 | | policy_loss | -0.0117 | | total_timesteps | 30000 | | value_loss | 3.33e-06 | --------------------------------- --------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -426 | | explained_variance | 0.413 | | fps | 1253 | | nupdates | 1600 | | policy_entropy | 1.35 | | policy_loss | -0.0134 | | total_timesteps | 32000 | | value_loss | 1.12e-06 | --------------------------------- --------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -392 | | explained_variance | -0.00011 | | fps | 1254 | | nupdates | 1700 | | policy_entropy | 1.27 | | policy_loss | -22 | | total_timesteps | 34000 | | value_loss | 970 | --------------------------------- --------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -377 | | explained_variance | 1.26e-05 | | fps | 1255 | | nupdates | 1800 | | policy_entropy | 1.27 | | policy_loss | -124 | | total_timesteps | 36000 | | value_loss | 7.82e+03 | --------------------------------- --------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -377 | | explained_variance | 0.000336 | | fps | 1256 | | nupdates | 1900 | | policy_entropy | 1.32 | | policy_loss | 59.4 | | total_timesteps | 38000 | | value_loss | 4.07e+03 | --------------------------------- --------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -364 | | explained_variance | 0.000371 | | fps | 1257 | | nupdates | 2000 | | policy_entropy | 1.35 | | policy_loss | 116 | | total_timesteps | 40000 | | value_loss | 7.81e+03 | --------------------------------- --------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -359 | | explained_variance | -1.94 | | fps | 1257 | | nupdates | 2100 | | policy_entropy | 1.38 | | policy_loss | -0.0157 | | total_timesteps | 42000 | | value_loss | 4.23e-06 | --------------------------------- --------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -336 | | explained_variance | 0.494 | | fps | 1258 | | nupdates | 2200 | | policy_entropy | 1.38 | | policy_loss | -0.0175 | | total_timesteps | 44000 | | value_loss | 8.93e-06 | --------------------------------- --------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -313 | | explained_variance | 0.071 | | fps | 1259 | | nupdates | 2300 | | policy_entropy | 1.38 | | policy_loss | -0.0205 | | total_timesteps | 46000 | | value_loss | 2.63e-05 | --------------------------------- --------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -318 | | explained_variance | -3.05 | | fps | 1259 | | nupdates | 2400 | | policy_entropy | 1.38 | | policy_loss | -0.0126 | | total_timesteps | 48000 | | value_loss | 1.01e-05 | --------------------------------- --------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -308 | | explained_variance | -0.223 | | fps | 1260 | | nupdates | 2500 | | policy_entropy | 1.37 | | policy_loss | -0.0161 | | total_timesteps | 50000 | | value_loss | 4.16e-06 | --------------------------------- --------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -304 | | explained_variance | -0.795 | | fps | 1260 | | nupdates | 2600 | | policy_entropy | 1.37 | | policy_loss | -0.0182 | | total_timesteps | 52000 | | value_loss | 1.62e-05 | --------------------------------- --------------------------------- | ep_len_mean | 201 | | ep_reward_mean | -300 | | explained_variance | -0.311 | | fps | 1261 | | nupdates | 2700 | | policy_entropy | 1.38 | | policy_loss | -0.0186 | | total_timesteps | 54000 | | value_loss | 1.6e-05 | --------------------------------- --------------------------------- | ep_len_mean | 199 | | ep_reward_mean | -264 | | explained_variance | 0.0573 | | fps | 1261 | | nupdates | 2800 | | policy_entropy | 1.38 | | policy_loss | -0.0212 | | total_timesteps | 56000 | | value_loss | 3.45e-05 | --------------------------------- --------------------------------- | ep_len_mean | 199 | | ep_reward_mean | -226 | | explained_variance | -3.36 | | fps | 1262 | | nupdates | 2900 | | policy_entropy | 1.36 | | policy_loss | -0.0107 | | total_timesteps | 58000 | | value_loss | 1.11e-05 | --------------------------------- --------------------------------- | ep_len_mean | 199 | | ep_reward_mean | -221 | | explained_variance | -0.187 | | fps | 1262 | | nupdates | 3000 | | policy_entropy | 1.38 | | policy_loss | -0.0219 | | total_timesteps | 60000 | | value_loss | 4.85e-05 | --------------------------------- --------------------------------- | ep_len_mean | 199 | | ep_reward_mean | -215 | | explained_variance | -5.68 | | fps | 1262 | | nupdates | 3100 | | policy_entropy | 1.36 | | policy_loss | -0.0262 | | total_timesteps | 62000 | | value_loss | 0.000103 | --------------------------------- --------------------------------- | ep_len_mean | 198 | | ep_reward_mean | -170 | | explained_variance | 0.000507 | | fps | 1263 | | nupdates | 3200 | | policy_entropy | 1.38 | | policy_loss | 119 | | total_timesteps | 64000 | | value_loss | 7.81e+03 | --------------------------------- --------------------------------- | ep_len_mean | 198 | | ep_reward_mean | -175 | | explained_variance | -0.506 | | fps | 1263 | | nupdates | 3300 | | policy_entropy | 1.38 | | policy_loss | -0.0174 | | total_timesteps | 66000 | | value_loss | 1.03e-05 | --------------------------------- --------------------------------- | ep_len_mean | 197 | | ep_reward_mean | -145 | | explained_variance | 3.67e-05 | | fps | 1263 | | nupdates | 3400 | | policy_entropy | 1.38 | | policy_loss | 20.5 | | total_timesteps | 68000 | | value_loss | 1.44e+03 | --------------------------------- --------------------------------- | ep_len_mean | 196 | | ep_reward_mean | -114 | | explained_variance | -1.71 | | fps | 1263 | | nupdates | 3500 | | policy_entropy | 1.37 | | policy_loss | -0.0166 | | total_timesteps | 70000 | | value_loss | 1.17e-05 | --------------------------------- --------------------------------- | ep_len_mean | 196 | | ep_reward_mean | -66.8 | | explained_variance | -1.37 | | fps | 1263 | | nupdates | 3600 | | policy_entropy | 1.38 | | policy_loss | -0.0194 | | total_timesteps | 72000 | | value_loss | 2.63e-05 | --------------------------------- --------------------------------- | ep_len_mean | 195 | | ep_reward_mean | -11.9 | | explained_variance | -3.93 | | fps | 1264 | | nupdates | 3700 | | policy_entropy | 1.37 | | policy_loss | -0.0467 | | total_timesteps | 74000 | | value_loss | 0.000802 | --------------------------------- --------------------------------- | ep_len_mean | 196 | | ep_reward_mean | 5.91 | | explained_variance | -1.15 | | fps | 1264 | | nupdates | 3800 | | policy_entropy | 1.38 | | policy_loss | -0.0054 | | total_timesteps | 76000 | | value_loss | 6.35e-05 | --------------------------------- --------------------------------- | ep_len_mean | 193 | | ep_reward_mean | 73 | | explained_variance | -1.33 | | fps | 1264 | | nupdates | 3900 | | policy_entropy | 1.36 | | policy_loss | -0.0216 | | total_timesteps | 78000 | | value_loss | 5.23e-05 | --------------------------------- --------------------------------- | ep_len_mean | 189 | | ep_reward_mean | 255 | | explained_variance | -2.78 | | fps | 1264 | | nupdates | 4000 | | policy_entropy | 1.29 | | policy_loss | -0.0768 | | total_timesteps | 80000 | | value_loss | 0.00266 | --------------------------------- --------------------------------- | ep_len_mean | 189 | | ep_reward_mean | 278 | | explained_variance | 0.157 | | fps | 1264 | | nupdates | 4100 | | policy_entropy | 1.37 | | policy_loss | -0.0131 | | total_timesteps | 82000 | | value_loss | 1.75e-05 | --------------------------------- --------------------------------- | ep_len_mean | 170 | | ep_reward_mean | 707 | | explained_variance | 0.000953 | | fps | 1264 | | nupdates | 4200 | | policy_entropy | 0.94 | | policy_loss | 1.01e+03 | | total_timesteps | 84000 | | value_loss | 2.01e+06 | --------------------------------- --------------------------------- | ep_len_mean | 137 | | ep_reward_mean | 1.21e+03 | | explained_variance | 0.471 | | fps | 1263 | | nupdates | 4300 | | policy_entropy | 0.83 | | policy_loss | -0.0847 | | total_timesteps | 86000 | | value_loss | 0.114 | --------------------------------- --------------------------------- | ep_len_mean | 68.7 | | ep_reward_mean | 1.86e+03 | | explained_variance | 0.00681 | | fps | 1263 | | nupdates | 4400 | | policy_entropy | 0.517 | | policy_loss | 74.5 | | total_timesteps | 88000 | | value_loss | 1.03e+06 | --------------------------------- --------------------------------- | ep_len_mean | 23.5 | | ep_reward_mean | 1.97e+03 | | explained_variance | 0.00852 | | fps | 1262 | | nupdates | 4500 | | policy_entropy | 0.211 | | policy_loss | 59.4 | | total_timesteps | 90000 | | value_loss | 3.15e+06 | --------------------------------- --------------------------------- | ep_len_mean | 21.2 | | ep_reward_mean | 1.98e+03 | | explained_variance | 0.0106 | | fps | 1261 | | nupdates | 4600 | | policy_entropy | 0.149 | | policy_loss | 20.5 | | total_timesteps | 92000 | | value_loss | 2.26e+06 | --------------------------------- --------------------------------- | ep_len_mean | 22.6 | | ep_reward_mean | 1.96e+03 | | explained_variance | 0.0142 | | fps | 1260 | | nupdates | 4700 | | policy_entropy | 0.141 | | policy_loss | 399 | | total_timesteps | 94000 | | value_loss | 2.72e+06 | --------------------------------- --------------------------------- | ep_len_mean | 20.8 | | ep_reward_mean | 1.98e+03 | | explained_variance | 0.011 | | fps | 1260 | | nupdates | 4800 | | policy_entropy | 0.104 | | policy_loss | 7.25 | | total_timesteps | 96000 | | value_loss | 1.78e+06 | --------------------------------- --------------------------------- | ep_len_mean | 20.4 | | ep_reward_mean | 1.98e+03 | | explained_variance | 0.0091 | | fps | 1260 | | nupdates | 4900 | | policy_entropy | 0.0783 | | policy_loss | 5.12 | | total_timesteps | 98000 | | value_loss | 1.99e+06 | --------------------------------- --------------------------------- | ep_len_mean | 20.4 | | ep_reward_mean | 1.98e+03 | | explained_variance | 0.00713 | | fps | 1260 | | nupdates | 5000 | | policy_entropy | 0.115 | | policy_loss | -0.78 | | total_timesteps | 100000 | | value_loss | 1.28e+06 | --------------------------------- --------------------------------- | ep_len_mean | 20.4 | | ep_reward_mean | 1.98e+03 | | explained_variance | 0.0218 | | fps | 1259 | | nupdates | 5100 | | policy_entropy | 0.0424 | | policy_loss | 0.498 | | total_timesteps | 102000 | | value_loss | 1.57e+06 | --------------------------------- --------------------------------- | ep_len_mean | 20.1 | | ep_reward_mean | 1.98e+03 | | explained_variance | 0.00849 | | fps | 1259 | | nupdates | 5200 | | policy_entropy | 0.0179 | | policy_loss | -0.0378 | | total_timesteps | 104000 | | value_loss | 1.72e+05 | --------------------------------- --------------------------------- | ep_len_mean | 20.1 | | ep_reward_mean | 1.98e+03 | | explained_variance | 0.0211 | | fps | 1259 | | nupdates | 5300 | | policy_entropy | 0.024 | | policy_loss | 0.205 | | total_timesteps | 106000 | | value_loss | 1.26e+06 | --------------------------------- --------------------------------- | ep_len_mean | 20.1 | | ep_reward_mean | 1.98e+03 | | explained_variance | 0.039 | | fps | 1259 | | nupdates | 5400 | | policy_entropy | 0.0104 | | policy_loss | 0.972 | | total_timesteps | 108000 | | value_loss | 2.55e+06 | --------------------------------- --------------------------------- | ep_len_mean | 20 | | ep_reward_mean | 1.98e+03 | | explained_variance | 0.0334 | | fps | 1259 | | nupdates | 5500 | | policy_entropy | 0.00561 | | policy_loss | 0.349 | | total_timesteps | 110000 | | value_loss | 2.52e+06 | --------------------------------- --------------------------------- | ep_len_mean | 20 | | ep_reward_mean | 1.98e+03 | | explained_variance | 0.0375 | | fps | 1259 | | nupdates | 5600 | | policy_entropy | 0.0026 | | policy_loss | 0.306 | | total_timesteps | 112000 | | value_loss | 2.62e+06 | --------------------------------- --------------------------------- | ep_len_mean | 20 | | ep_reward_mean | 1.98e+03 | | explained_variance | 0.0361 | | fps | 1258 | | nupdates | 5700 | | policy_entropy | 0.00159 | | policy_loss | 0.145 | | total_timesteps | 114000 | | value_loss | 2.61e+06 | --------------------------------- --------------------------------- | ep_len_mean | 20 | | ep_reward_mean | 1.98e+03 | | explained_variance | 0.0308 | | fps | 1258 | | nupdates | 5800 | | policy_entropy | 0.00105 | | policy_loss | 0.089 | | total_timesteps | 116000 | | value_loss | 2.6e+06 | --------------------------------- --------------------------------- | ep_len_mean | 20 | | ep_reward_mean | 1.98e+03 | | explained_variance | 0.0279 | | fps | 1258 | | nupdates | 5900 | | policy_entropy | 0.000787 | | policy_loss | 0.0623 | | total_timesteps | 118000 | | value_loss | 2.59e+06 | --------------------------------- --------------------------------- | ep_len_mean | 21.8 | | ep_reward_mean | 1.96e+03 | | explained_variance | -0.983 | | fps | 1258 | | nupdates | 6000 | | policy_entropy | 0.135 | | policy_loss | -8.94 | | total_timesteps | 120000 | | value_loss | 919 | --------------------------------- --------------------------------- | ep_len_mean | 36.1 | | ep_reward_mean | 1.8e+03 | | explained_variance | 0.0285 | | fps | 1258 | | nupdates | 6100 | | policy_entropy | 0.202 | | policy_loss | 2.62 | | total_timesteps | 122000 | | value_loss | 8.08e+05 | --------------------------------- --------------------------------- | ep_len_mean | 21.1 | | ep_reward_mean | 1.98e+03 | | explained_variance | 0.0263 | | fps | 1258 | | nupdates | 6200 | | policy_entropy | 0.0413 | | policy_loss | 0.446 | | total_timesteps | 124000 | | value_loss | 9.49e+05 | --------------------------------- --------------------------------- | ep_len_mean | 20.3 | | ep_reward_mean | 1.98e+03 | | explained_variance | 0.0725 | | fps | 1257 | | nupdates | 6300 | | policy_entropy | 0.0795 | | policy_loss | 1.3 | | total_timesteps | 126000 | | value_loss | 2.49e+06 | --------------------------------- --------------------------------- | ep_len_mean | 20.6 | | ep_reward_mean | 1.98e+03 | | explained_variance | 0.0398 | | fps | 1256 | | nupdates | 6400 | | policy_entropy | 0.0273 | | policy_loss | 1.16 | | total_timesteps | 128000 | | value_loss | 2.37e+06 | --------------------------------- ☆山山山 山 川川山山 G 山 三三 山 山 山 川川山 山 山山 山 山 山 山 山 山 山山 山 reward: [-1.] total_reward [-1.] ----------- S山山山 山 ☆ 川川山山 G 山 三三 山 山 山 川川山 山 山山 山 山 山 山 山 山 山山 山 reward: [-1.] total_reward [-2.] ----------- ☆山山山 山 川川山山 G 山 三三 山 山 山 川川山 山 山山 山 山 山 山 山 山 山山 山 reward: [-1.] total_reward [-3.] ----------- S山山山 山 ☆ 川川山山 G 山 三三 山 山 山 川川山 山 山山 山 山 山 山 山 山 山山 山 reward: [-1.] total_reward [-4.] ----------- S山山山 山 ☆川川山山 G 山 三三 山 山 山 川川山 山 山山 山 山 山 山 山 山 山山 山 reward: [-1.] total_reward [-5.] ----------- S山山山 山 川川山山 G 山☆三三 山 山 山 川川山 山 山山 山 山 山 山 山 山 山山 山 reward: [-1.] total_reward [-6.] ----------- S山山山 山 川川山山 G 山 三三 山 山 山☆川川山 山 山山 山 山 山 山 山 山 山山 山 reward: [-1.] total_reward [-7.] ----------- S山山山 山 川川山山 G 山 三三 山 山 山 川川山 ☆山 山山 山 山 山 山 山 山 山山 山 reward: [-1.] total_reward [-8.] ----------- S山山山 山 川川山山 G 山 三三 山 山 山 川川山 山 山山 山☆山 山 山 山 山 山山 山 reward: [-1.] total_reward [-9.] ----------- S山山山 山 川川山山 G 山 三三 山 山 山 川川山 山 山山 山 山 山 山 山☆ 山 山山 山 reward: [-1.] total_reward [-10.] ----------- S山山山 山 川川山山 G 山 三三 山 山 山 川川山 山 山山 山 山 山 山 山 ☆ 山 山山 山 reward: [-1.] total_reward [-11.] ----------- S山山山 山 川川山山 G 山 三三 山 山 山 川川山 山 山山 山 山 山 山 山 ☆ 山 山山 山 reward: [-1.] total_reward [-12.] ----------- S山山山 山 川川山山 G 山 三三 山 山 山 川川山 山 山山 山 山 山 山 山 ☆ 山 山山 山 reward: [-1.] total_reward [-13.] ----------- S山山山 山 川川山山 G 山 三三 山 山 山 川川山 山 山山 山 山 山 山 山 ☆ 山 山山 山 reward: [-1.] total_reward [-14.] ----------- S山山山 山 川川山山 G 山 三三 山 山 山 川川山 山 山山 山 山 山 山 山 ☆ 山 山山 山 reward: [-1.] total_reward [-15.] ----------- S山山山 山 川川山山 G 山 三三 山 山 山 川川山 山 山山 山 山 山 山 山 ☆ 山 山山 山 reward: [-1.] total_reward [-16.] ----------- S山山山 山 川川山山 G 山 三三 山 山 山 川川山 山 山山 山 山 山 山☆ 山 山 山山 山 reward: [-1.] total_reward [-17.] ----------- S山山山 山 川川山山 G 山 三三 山 山 山 川川山 山 山山☆ 山 山 山 山 山 山 山山 山 reward: [-1.] total_reward [-18.] ----------- S山山山 山 川川山山 G 山 三三 山 山 山 川川山 ☆ 山 山山 山 山 山 山 山 山 山山 山 reward: [-1.] total_reward [-19.] ----------- S山山山 山 川川山山 G 山 三三 山 山 山 川川山 ☆ 山 山山 山 山 山 山 山 山 山山 山 reward: [-1.] total_reward [-20.] ----------- S山山山 山 川川山山 G 山 三三 山☆山 山 川川山 山 山山 山 山 山 山 山 山 山山 山 reward: [-1.] total_reward [-21.] ----------- S山山山 山 川川山山☆G 山 三三 山 山 山 川川山 山 山山 山 山 山 山 山 山 山山 山 reward: [2000.] total_reward [1979.] ----------- total_reward: [1979.]
スタート時に一度出戻りしますが、その後はまっすぐゴールに向かっています。
平均報酬をグラフ化
確認のために学習中の平均報酬推移をグラフにします。
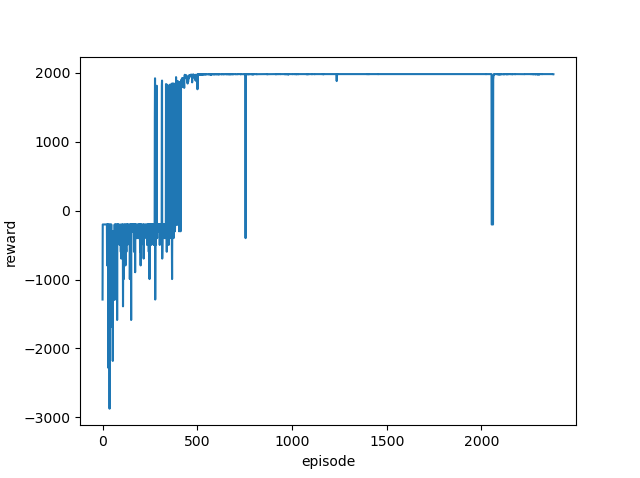
400エピソードを超えたあたりからゴール報酬の2000を取得できるようになっていることが分かります。
調整内容のまとめ
報酬に関しては、ゴールまでの距離が遠くなるほど大きめの報酬にしないといけないと感じました。
ゴールの報酬が、ゴール地点から波紋のように広がっていくイメージです。
また学習率はエージェントの大胆さを調整しているイメージでした。
学習率が低い場合は、臆病な感じで近くに障害(今回の場合は川)があるとそこに近づこうとはせずにスタート位置付近から移動しようとしません。
逆に学習率を高く設定した場合は、大胆にいろいろ行動するようになり、(川に飛び込んでしまうこともありますが)最終的にゴールにたどり着くことができるようになりました。
カスタムGym環境に合わせ報酬も学習率も適切に設定する必要性を強く感じました。