AlphaZeroのアルゴリズムを使ってどうぶつ将棋の対戦ゲームを作ります。
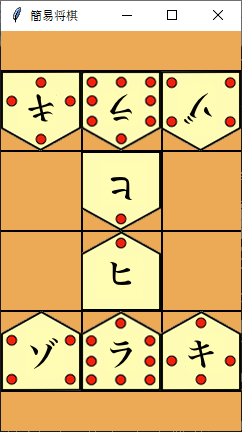
どうぶつ将棋は、駒の動きを簡易化した将棋で「ライオン」「ゾウ」「キリン」「ヒヨコ」の4種類の駒を使います。
最初の盤面は次のようになります。
ソースコード一覧は下記のようになります。
ソースコード
説明
3目並べとの相違
game.py
ゲーム状態
全て
dual_network.py
デュアルネットワーク
パラメータのみ
pv_mcts.py
モンテカルロ木探索
デュアルネットワークの入力変更
self_play.py
セルフプレイ部
デュアルネットワークの入力変更
train_network.py
パラメータ更新部
なし
evaluate_network.py
新パラメータ評価部
なし
train_cycle.py
学習サイクルの実行
ベストプレイヤーの評価を削除
human_play.py
ゲームUI
全て
まずどうぶつ将棋のゲーム状態を作成します。
game.py 1 2 3 4 5 6 7 8 9 10 import randomimport mathclass State :
自分の駒の配置と相手の駒の配置を長さ15の1次元配列で保持します。
この1次元の配列にどの駒があるかは次の駒IDで管理します。
駒ID
説明
0
なし
1
ヒヨコ
2
ゾウ
3
キリン
4
ライオン
5
ヒヨコの持ち駒
6
ゾウの持ち駒
7
キリンの持ち駒
ほかの変数に関しては次の通りです。
depthは何ターン目かを表します。
dxyは8方向(下、左下、左、左上、上、右上、右、右下)を表します。
game.py 1 2 3 4 5 6 7 8 9 10 11 12 13 14 def __init__ (self, pieces=None , enemy_pieces=None , depth=0 ): self .dxy = ((0 , -1 ), (1 , -1 ), (1 , 0 ), (1 , 1 ), (0 , 1 ), (-1 , 1 ), (-1 , 0 ), (-1 , -1 )) self .pieces = pieces if pieces != None else [0 ] * (12 +3 ) self .enemy_pieces = enemy_pieces if enemy_pieces != None else [0 ] * (12 +3 ) self .depth = depth if pieces == None or enemy_pieces == None : self .pieces = [0 , 0 , 0 , 0 , 0 , 0 , 0 , 1 , 0 , 2 , 4 , 3 , 0 , 0 , 0 ] self .enemy_pieces = [0 , 0 , 0 , 0 , 0 , 0 , 0 , 1 , 0 , 2 , 4 , 3 , 0 , 0 , 0 ]
負けかどうかを判定します。
game.py 1 2 3 4 5 6 def is_lose (self ): for i in range (12 ): if self .pieces[i] == 4 : return False return True
引き分けかどうかを判定します。
game.py 1 2 3 def is_draw (self ): return self .depth >= 300
ゲーム終了かどうかを判定します。
game.py 1 2 3 def is_done (self ): return self .is_lose() or self .is_draw()
「駒の配置の2つの1次元配列(自分と相手の駒の配列)」をデュアルネットワークの入力(14個の2次元配列)に変換します。
game.py 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 def pieces_array (self ): def pieces_array_of (pieces ): table_list = [] for j in range (1 , 5 ): table = [0 ] * 12 table_list.append(table) for i in range (12 ): if pieces[i] == j: table[i] = 1 for j in range (1 , 4 ): flag = 1 if pieces[11 +j] > 0 else 0 table = [flag] * 12 table_list.append(table) return table_list return [pieces_array_of(self .pieces), pieces_array_of(self .enemy_pieces)]
駒の移動先と駒の移動元を行動に変換します。
game.py 1 2 3 def position_to_action (self, position, direction ): return position * 11 + direction
行動を駒の移動先と移動元に変換します。
game.py 1 2 3 def action_to_position (self, action ): return (int (action/11 ), action%11 )
合法手のリストを取得します。
game.py 1 2 3 4 5 6 7 8 9 10 11 12 13 14 def legal_actions (self ): actions = [] for p in range (12 ): if self .pieces[p] != 0 : actions.extend(self .legal_actions_pos(p)) if self .pieces[p] == 0 and self .enemy_pieces[11 -p] == 0 : for capture in range (1 , 4 ): if self .pieces[11 +capture] != 0 : actions.append(self .position_to_action(p, 8 -1 +capture)) return actions
駒の移動時の合法手のリストを取得します。
game.py 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 def legal_actions_pos (self, position_src ): actions = [] piece_type = self .pieces[position_src] if piece_type > 4 : piece_type-4 directions = [] if piece_type == 1 : directions = [0 ] elif piece_type == 2 : directions = [1 , 3 , 5 , 7 ] elif piece_type == 3 : directions = [0 , 2 , 4 , 6 ] elif piece_type == 4 : directions = [0 , 1 , 2 , 3 , 4 , 5 , 6 , 7 ] for direction in directions: x = position_src%3 + self .dxy[direction][0 ] y = int (position_src/3 ) + self .dxy[direction][1 ] p = x + y * 3 if 0 <= x and x <= 2 and 0 <= y and y <= 3 and self .pieces[p] == 0 : actions.append(self .position_to_action(p, direction)) return actions
行動に応じた次の状態を取得します。
game.py 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 def next (self, action ): state = State(self .pieces.copy(), self .enemy_pieces.copy(), self .depth+1 ) position_dst, position_src = self .action_to_position(action) if position_src < 8 : x = position_dst%3 - self .dxy[position_src][0 ] y = int (position_dst/3 ) - self .dxy[position_src][1 ] position_src = x + y * 3 state.pieces[position_dst] = state.pieces[position_src] state.pieces[position_src] = 0 piece_type = state.enemy_pieces[11 -position_dst] if piece_type != 0 : if piece_type != 4 : state.pieces[11 +piece_type] += 1 state.enemy_pieces[11 -position_dst] = 0 else : capture = position_src-7 state.pieces[position_dst] = capture state.pieces[11 +capture] -= 1 w = state.pieces state.pieces = state.enemy_pieces state.enemy_pieces = w return state
先手化どうかを取得します。
game.py 1 2 3 def is_first_player (self ): return self .depth%2 == 0
ゲーム状態の文字列表示を行います。
各駒は次の文字列で表現されます。
駒の文字表現
説明
H
先手のヒヨコ
Z
先手のゾウ
K
先手のキリン
R
先手のライオン
h
後手のヒヨコ
z
後手のゾウ
k
後手のキリン
r
後手のライオン
game.py 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 def __str__ (self ): pieces0 = self .pieces if self .is_first_player() else self .enemy_pieces pieces1 = self .enemy_pieces if self .is_first_player() else self .pieces hzkr0 = ('' , 'H' , 'Z' , 'K' , 'R' ) hzkr1 = ('' , 'h' , 'z' , 'k' , 'r' ) str = ' [' for i in range (12 , 15 ): if pieces1[i] >= 2 : str += ' ' + hzkr1[i-11 ] if pieces1[i] >= 1 : str += ' ' + hzkr1[i-11 ] str += ' ]\n' for i in range (12 ): if pieces0[i] != 0 : str += ' ' + hzkr0[pieces0[i]] elif pieces1[11 -i] != 0 : str += ' ' + hzkr1[pieces1[11 -i]] else : str += ' -' if i % 3 == 2 : str += '\n' str += ' [' for i in range (12 , 15 ): if pieces0[i] >= 2 : str += ' ' + hzkr0[i-11 ] if pieces0[i] >= 1 : str += ' ' + hzkr0[i-11 ] str += ' ]\n' return str
動作確認用にランダム対ランダムで対戦するコードを追加します。
game.py 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 def random_action (state ): legal_actions = state.legal_actions() return legal_actions[random.randint(0 , len (legal_actions)-1 )] if __name__ == '__main__' : state = State() while True : if state.is_done(): break state = state.next (random_action(state)) print (state) print ()
試しに実行したところ下記のような結果となりました。
次にデュアルネットワークを実装します。
dual_network.py 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 from tensorflow.keras.layers import Activation, Add, BatchNormalization, Conv2D, Dense, GlobalAveragePooling2D, Inputfrom tensorflow.keras.models import Modelfrom tensorflow.keras.regularizers import l2from tensorflow.keras import backend as Kimport osDN_FILTERS = 128 DN_RESIDUAL_NUM = 16 DN_INPUT_SHAPE = (3 , 4 , 14 ) DN_OUTPUT_SIZE = 132 def conv (filters ): return Conv2D(filters, 3 , padding='same' , use_bias=False , kernel_initializer='he_normal' , kernel_regularizer=l2(0.0005 )) def residual_block (): def f (x ): sc = x x = conv(DN_FILTERS)(x) x = BatchNormalization()(x) x = Activation('relu' )(x) x = conv(DN_FILTERS)(x) x = BatchNormalization()(x) x = Add()([x, sc]) x = Activation('relu' )(x) return x return f def dual_network (): if os.path.exists('./model/best.h5' ): return input = Input(shape=DN_INPUT_SHAPE) x = conv(DN_FILTERS)(input ) x = BatchNormalization()(x) x = Activation('relu' )(x) for i in range (DN_RESIDUAL_NUM): x = residual_block()(x) x = GlobalAveragePooling2D()(x) p = Dense(DN_OUTPUT_SIZE, kernel_regularizer=l2(0.0005 ), activation='softmax' , name='pi' )(x) v = Dense(1 , kernel_regularizer=l2(0.0005 ))(x) v = Activation('tanh' , name='v' )(v) model = Model(inputs=input , outputs=[p,v]) os.makedirs('./model/' , exist_ok=True ) model.save('./model/best.h5' ) K.clear_session() del model
モンテカルロ木探索を実装します。デュアルネットワークの入力を変更します。(state.pieces_array())
pv_mcts.py 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 from game import Statefrom dual_network import DN_INPUT_SHAPEfrom math import sqrtfrom tensorflow.keras.models import load_modelfrom pathlib import Pathimport numpy as npPV_EVALUATE_COUNT = 50 def predict (model, state ): a, b, c = DN_INPUT_SHAPE x = np.array(state.pieces_array()) x = x.reshape(c, a, b).transpose(1 , 2 , 0 ).reshape(1 , a, b, c) y = model.predict(x, batch_size=1 ) policies = y[0 ][0 ][list (state.legal_actions())] policies /= sum (policies) if sum (policies) else 1 value = y[1 ][0 ][0 ] return policies, value def nodes_to_scores (nodes ): scores = [] for c in nodes: scores.append(c.n) return scores def pv_mcts_scores (model, state, temperature ): class Node : def __init__ (self, state, p ): self .state = state self .p = p self .w = 0 self .n = 0 self .child_nodes = None def evaluate (self ): if self .state.is_done(): value = -1 if self .state.is_lose() else 0 self .w += value self .n += 1 return value if not self .child_nodes: policies, value = predict(model, self .state) self .w += value self .n += 1 self .child_nodes = [] for action, policy in zip (self .state.legal_actions(), policies): self .child_nodes.append(Node(self .state.next (action), policy)) return value else : value = -self .next_child_node().evaluate() self .w += value self .n += 1 return value def next_child_node (self ): C_PUCT = 1.0 t = sum (nodes_to_scores(self .child_nodes)) pucb_values = [] for child_node in self .child_nodes: pucb_values.append((-child_node.w / child_node.n if child_node.n else 0.0 ) + C_PUCT * child_node.p * sqrt(t) / (1 + child_node.n)) return self .child_nodes[np.argmax(pucb_values)] root_node = Node(state, 0 ) for _ in range (PV_EVALUATE_COUNT): root_node.evaluate() scores = nodes_to_scores(root_node.child_nodes) if temperature == 0 : action = np.argmax(scores) scores = np.zeros(len (scores)) scores[action] = 1 else : scores = boltzman(scores, temperature) return scores def pv_mcts_action (model, temperature=0 ): def pv_mcts_action (state ): scores = pv_mcts_scores(model, state, temperature) return np.random.choice(state.legal_actions(), p=scores) return pv_mcts_action def boltzman (xs, temperature ): xs = [x ** (1 / temperature) for x in xs] return [x / sum (xs) for x in xs]
セルフプレイを実装します。デュアルネットワークの入力を変更します。(state.pieces_array())
self_play.py 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 from game import Statefrom pv_mcts import pv_mcts_scoresfrom dual_network import DN_OUTPUT_SIZEfrom datetime import datetimefrom tensorflow.keras.models import load_modelfrom tensorflow.keras import backend as Kfrom pathlib import Pathimport numpy as npimport pickleimport osSP_GAME_COUNT = 500 SP_TEMPERATURE = 1.0 def first_player_value (ended_state ): if ended_state.is_lose(): return -1 if ended_state.is_first_player() else 1 return 0 def write_data (history ): now = datetime.now() os.makedirs('./data/' , exist_ok=True ) path = './data/{:04}{:02}{:02}{:02}{:02}{:02}.history' .format ( now.year, now.month, now.day, now.hour, now.minute, now.second) with open (path, mode='wb' ) as f: pickle.dump(history, f) def play (model ): history = [] state = State() while True : if state.is_done(): break scores = pv_mcts_scores(model, state, SP_TEMPERATURE) policies = [0 ] * DN_OUTPUT_SIZE for action, policy in zip (state.legal_actions(), scores): policies[action] = policy history.append([state.pieces_array(), policies, None ]) action = np.random.choice(state.legal_actions(), p=scores) state = state.next (action) value = first_player_value(state) for i in range (len (history)): history[i][2 ] = value value = -value return history def self_play (): history = [] model = load_model('./model/best.h5' ) for i in range (SP_GAME_COUNT): h = play(model) history.extend(h) print ('\rSelfPlay {}/{}' .format (i+1 , SP_GAME_COUNT), end='' ) print ('' ) write_data(history) K.clear_session() del model
パラメータ更新部を実装します。変更はありません。
train_network.py 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 from dual_network import DN_INPUT_SHAPEfrom tensorflow.keras.callbacks import LearningRateScheduler, LambdaCallbackfrom tensorflow.keras.models import load_modelfrom tensorflow.keras import backend as Kfrom pathlib import Pathimport numpy as npimport pickleRN_EPOCHS = 100 def load_data (): history_path = sorted (Path('./data' ).glob('*.history' ))[-1 ] with history_path.open (mode='rb' ) as f: return pickle.load(f) def train_network (): history = load_data() xs, y_policies, y_values = zip (*history) a, b, c = DN_INPUT_SHAPE xs = np.array(xs) xs = xs.reshape(len (xs), c, a, b).transpose(0 , 2 , 3 , 1 ) y_policies = np.array(y_policies) y_values = np.array(y_values) model = load_model('./model/best.h5' ) model.compile (loss=['categorical_crossentropy' , 'mse' ], optimizer='adam' ) def step_decay (epoch ): x = 0.001 if epoch >= 50 : x = 0.0005 if epoch >= 80 : x = 0.00025 return x lr_decay = LearningRateScheduler(step_decay) print_callback = LambdaCallback( on_epoch_begin=lambda epoch,logs: print ('\rTrain {}/{}' .format (epoch + 1 ,RN_EPOCHS), end='' )) model.fit(xs, [y_policies, y_values], batch_size=128 , epochs=RN_EPOCHS, verbose=0 , callbacks=[lr_decay, print_callback]) print ('' ) model.save('./model/latest.h5' ) K.clear_session() del model
新パラメータ評価部を実装します。変更はありません。
evaluate_network.py 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 from game import Statefrom pv_mcts import pv_mcts_actionfrom tensorflow.keras.models import load_modelfrom tensorflow.keras import backend as Kfrom pathlib import Pathfrom shutil import copyimport numpy as npEN_GAME_COUNT = 10 EN_TEMPERATURE = 1.0 def first_player_point (ended_state ): if ended_state.is_lose(): return 0 if ended_state.is_first_player() else 1 return 0.5 def play (next_actions ): state = State() while True : if state.is_done(): break ; next_action = next_actions[0 ] if state.is_first_player() else next_actions[1 ] action = next_action(state) state = state.next (action) return first_player_point(state) def update_best_player (): copy('./model/latest.h5' , './model/best.h5' ) print ('Change BestPlayer' ) def evaluate_network (): model0 = load_model('./model/latest.h5' ) model1 = load_model('./model/best.h5' ) next_action0 = pv_mcts_action(model0, EN_TEMPERATURE) next_action1 = pv_mcts_action(model1, EN_TEMPERATURE) next_actions = (next_action0, next_action1) total_point = 0 for i in range (EN_GAME_COUNT): if i % 2 == 0 : total_point += play(next_actions) else : total_point += 1 - play(list (reversed (next_actions))) print ('\rEvaluate {}/{}' .format (i + 1 , EN_GAME_COUNT), end='' ) print ('' ) average_point = total_point / EN_GAME_COUNT print ('AveragePoint' , average_point) K.clear_session() del model0 del model1 if average_point > 0.5 : update_best_player() return True else : return False
学習サイクルを実行します。ベストプレイヤーの評価は削除しています。
学習完了までにCorei5、メモリ4G、GPUなしのPCでまる2日ほどかかりました。
train_cycle.py 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 from dual_network import dual_networkfrom self_play import self_playfrom train_network import train_networkfrom evaluate_network import evaluate_networkdual_network() for i in range (10 ): print ('Train' ,i,'====================' ) self_play() train_network() evaluate_network()
ゲームUIを実装します。
human_play.py 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 from game import Statefrom pv_mcts import pv_mcts_actionfrom tensorflow.keras.models import load_modelfrom pathlib import Pathfrom threading import Threadimport tkinter as tkfrom PIL import Image, ImageTkmodel = load_model('./model/best.h5' ) class GameUI (tk.Frame):
ゲーム状態の初期化で下記の3点を準備します。
ゲーム状態
モンテカルロ木探索で行動を行う関数
キャンバス
human_play.py 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 def __init__ (self, master=None , model=None ): tk.Frame.__init__(self , master) self .master.title('簡易将棋' ) self .state = State() self .select = -1 self .dxy = ((0 , -1 ), (1 , -1 ), (1 , 0 ), (1 , 1 ), (0 , 1 ), (-1 , 1 ), (-1 , 0 ), (-1 , -1 )) self .next_action = pv_mcts_action(model, 0.0 ) self .images = [(None , None , None , None )] for i in range (1 , 5 ): image = Image.open ('piece{}.png' .format (i)) self .images.append(( ImageTk.PhotoImage(image), ImageTk.PhotoImage(image.rotate(180 )), ImageTk.PhotoImage(image.resize((40 , 40 ))), ImageTk.PhotoImage(image.resize((40 , 40 )).rotate(180 )))) self .c = tk.Canvas(self , width = 240 , height = 400 , highlightthickness = 0 ) self .c.bind('<Button-1>' , self .turn_of_human) self .c.pack() self .on_draw()
人間のターンの処理を行います。
ゲーム終了時はゲーム状態を初期状態に戻します。
先手でないとき操作不可とします。
持ち駒の種類を取得します。
駒の選択と移動の位置の計算を行います。
駒が未選択の場合は駒を選択し、駒の移動指定を促します。
駒の選択と移動の位置を行動に変換します。
合法手でない場合は、駒の選択を解除します。
合法手の場合は、次の状態を取得して描画の更新を行います。
AIのターンへ遷移します。
human_play.py 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 def turn_of_human (self, event ): if self .state.is_done(): self .state = State() self .on_draw() return if not self .state.is_first_player(): return captures = [] for i in range (3 ): if self .state.pieces[12 +i] >= 2 : captures.append(1 +i) if self .state.pieces[12 +i] >= 1 : captures.append(1 +i) p = int (event.x/80 ) + int ((event.y-40 )/80 ) * 3 if 40 <= event.y and event.y <= 360 : select = p elif event.x < len (captures) * 40 and event.y > 360 : select = 12 + int (event.x/40 ) else : return if self .select < 0 : self .select = select self .on_draw() return action = -1 if select < 12 : if self .select < 12 : action = self .state.position_to_action(p, self .position_to_direction(self .select, p)) else : action = self .state.position_to_action(p, 8 -1 +captures[self .select-12 ]) if not (action in self .state.legal_actions()): self .select = -1 self .on_draw() return self .state = self .state.next (action) self .select = -1 self .on_draw() self .master.after(1 , self .turn_of_ai)
AIのターンの処理を行います。
ゲーム終了時は無処理とします。
デュアルネットワークで行動を取得します。
取得した行動に応じて次の状態を取得し、描画の更新を行います。
human_play.py 1 2 3 4 5 6 7 8 9 10 11 12 def turn_of_ai (self ): if self .state.is_done(): return action = self .next_action(self .state) self .state = self .state.next (action) self .on_draw()
駒の移動先を駒の移動方向に変換します。
human_play.py 1 2 3 4 5 6 7 def position_to_direction (self, position_src, position_dst ): dx = position_dst%3 -position_src%3 dy = int (position_dst/3 )-int (position_src/3 ) for i in range (8 ): if self .dxy[i][0 ] == dx and self .dxy[i][1 ] == dy: return i return 0
駒の描画を行います。
human_play.py 1 2 3 4 5 6 def draw_piece (self, index, first_player, piece_type ): x = (index%3 )*80 y = int (index/3 )*80 +40 index = 0 if first_player else 1 self .c.create_image(x, y, image=self .images[piece_type][index], anchor=tk.NW)
持ち駒の描画を行います。
human_play.py 1 2 3 4 5 6 7 8 9 def draw_capture (self, first_player, pieces ): index, x, dx, y = (2 , 0 , 40 , 360 ) if first_player else (3 , 200 , -40 , 0 ) captures = [] for i in range (3 ): if pieces[12 +i] >= 2 : captures.append(1 +i) if pieces[12 +i] >= 1 : captures.append(1 +i) for i in range (len (captures)): self .c.create_image(x+dx*i, y, image=self .images[captures[i]][index], anchor=tk.NW)
カーソルの描画を行います。
human_play.py 1 2 3 4 5 6 def draw_cursor (self, x, y, size ): self .c.create_line(x+1 , y+1 , x+size-1 , y+1 , width = 4.0 , fill = '#FF0000' ) self .c.create_line(x+1 , y+size-1 , x+size-1 , y+size-1 , width = 4.0 , fill = '#FF0000' ) self .c.create_line(x+1 , y+1 , x+1 , y+size-1 , width = 4.0 , fill = '#FF0000' ) self .c.create_line(x+size-1 , y+1 , x+size-1 , y+size-1 , width = 4.0 , fill = '#FF0000' )
全てのマス目、駒、持ち駒、選択カーソルを描画します。
human_play.py 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 def on_draw (self ): self .c.delete('all' ) self .c.create_rectangle(0 , 0 , 240 , 400 , width = 0.0 , fill = '#EDAA56' ) for i in range (1 ,3 ): self .c.create_line(i*80 +1 , 40 , i*80 , 360 , width = 2.0 , fill = '#000000' ) for i in range (5 ): self .c.create_line(0 , 40 +i*80 , 240 , 40 +i*80 , width = 2.0 , fill = '#000000' ) for p in range (12 ): p0, p1 = (p, 11 -p) if self .state.is_first_player() else (11 -p, p) if self .state.pieces[p0] != 0 : self .draw_piece(p, self .state.is_first_player(), self .state.pieces[p0]) if self .state.enemy_pieces[p1] != 0 : self .draw_piece(p, not self .state.is_first_player(), self .state.enemy_pieces[p1]) self .draw_capture(self .state.is_first_player(), self .state.pieces) self .draw_capture(not self .state.is_first_player(), self .state.enemy_pieces) if 0 <= self .select and self .select < 12 : self .draw_cursor(int (self .select%3 )*80 , int (self .select/3 )*80 +40 , 80 ) elif 12 <= self .select: self .draw_cursor((self .select-12 )*40 , 360 , 40 )
ゲームUIを実行します、
human_play.py 1 2 3 4 f = GameUI(model = model) f.pack() f.mainloop()
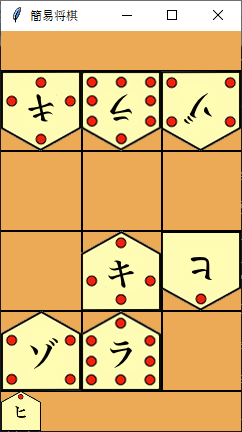
human_play.pyを実行するとどうぶつ将棋が始まりAIと対戦することができます。
かなり弱いAIで楽勝で勝ててしまいます。もうすこし学習サイクルを増やすべきでしょうか。
参考
AlphaZero 深層学習・強化学習・探索 人工知能プログラミング実践入門 サポートページ