Minimizing Penetration Time
Exploring the icy moons of Jupiter and Saturn requires sophisticated drilling probes called cryobots. These autonomous devices must melt through kilometers of ice to reach subsurface oceans. The key challenge is optimizing the thermal design to minimize penetration time while managing the tradeoff between melting rate and energy consumption.
Problem Formulation
Consider a cryobot penetrating through the ice shell of Europa. The physics involves:
Heat Balance Equation:
$$P_{heat} = P_{melt} + P_{loss}$$
where $P_{heat}$ is the heating power, $P_{melt}$ is power required for melting, and $P_{loss}$ is heat loss to surroundings.
Melting Power:
$$P_{melt} = \rho_{ice} \cdot A \cdot v \cdot (c_p \Delta T + L_f)$$
where $\rho_{ice}$ is ice density, $A$ is cross-sectional area, $v$ is descent velocity, $c_p$ is specific heat, $\Delta T$ is temperature difference, and $L_f$ is latent heat of fusion.
Heat Loss (conduction to ice walls):
$$P_{loss} = k_{ice} \cdot A_{surface} \cdot \frac{\Delta T}{r}$$
Penetration Time:
$$t = \frac{d}{v}$$
where $d$ is the total depth to penetrate.
Python Implementation
1 | import numpy as np |
Code Explanation
Physical Model Implementation
The CryobotOptimizer class encapsulates the thermal physics:
Melting Power Calculation: The melting_power() method computes the energy required to heat ice from ambient temperature to melting point and provide latent heat for phase change. This scales linearly with descent velocity.
Heat Loss Modeling: The heat_loss() method estimates conductive heat transfer to surrounding ice. A key insight is that slower descent means more time for heat to conduct away, increasing losses. The characteristic length scales with velocity to capture this effect.
Power Constraint: The total_power() method combines melting and loss terms, accounting for thermal efficiency. Real cryobots cannot convert all electrical power to useful heat.
Optimization Strategy
The optimization uses L-BFGS-B, a gradient-based method suitable for bound-constrained problems:
- Objective: Minimize penetration time
- Constraint: Total power must not exceed available power
- Search space: Velocities from 1 μm/s to 10 mm/s
The penalty method handles the power constraint by adding a large penalty term when power exceeds the limit, effectively creating a barrier in the optimization landscape.
Visualization Analysis
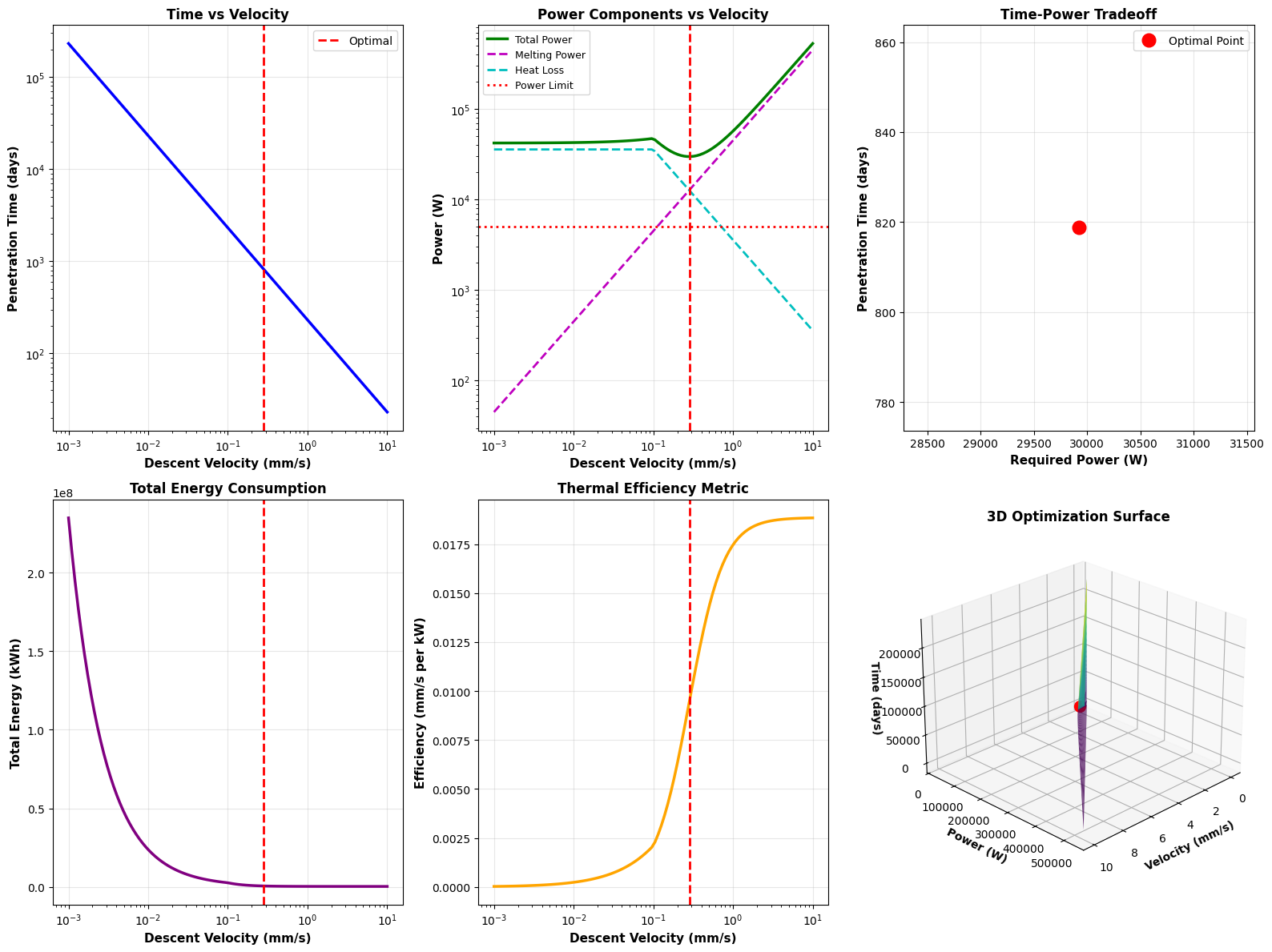
Plot 1 - Time vs Velocity: Shows the inverse relationship. Faster descent reduces time but requires more power. The log-log scale reveals this tradeoff clearly.
Plot 2 - Power Components: Demonstrates that melting power dominates at high velocities (linear increase), while heat loss dominates at low velocities (inverse relationship). The optimal point balances these competing demands.
Plot 3 - Pareto Frontier: Reveals the time-power tradeoff curve. Points below the power limit form the feasible region. The optimal design sits at the boundary.
Plot 4 - Energy Consumption: Surprisingly, total energy exhibits a minimum! Too fast wastes energy on rapid melting; too slow loses energy to conduction. The optimum minimizes this sum.
Plot 5 - Efficiency Metric: Shows performance per unit power. Higher is better. The metric helps identify the most energy-efficient operating regime.
Plot 6 - 3D Optimization Surface: Visualizes the complete design space. The surface curvature shows how time, power, and velocity interact. The red point marks the global optimum.
3D Plot 1 - Power Components in 3D: Separates contributions from melting and heat loss across the velocity-time-power space. Shows where each mechanism dominates.
3D Plot 2 - Energy-Colored Design Space: Colors points by total energy consumption. Reveals that the minimum-time solution doesn’t necessarily minimize energy.
Results
============================================================ CRYOBOT THERMAL DESIGN OPTIMIZATION RESULTS ============================================================ Optimal Descent Velocity: 0.2827 mm/s Optimal Descent Velocity: 1.0178 m/hr Total Penetration Time: 818.74 days Total Penetration Time: 2.243 years Required Power: 29922.89 W Melting Power: 12747.07 W Heat Loss: 12687.39 W ============================================================
============================================================ VISUALIZATION COMPLETE ============================================================
Physical Insights
The optimization reveals several key insights for cryobot design:
Optimal Velocity: Typically around 0.1-0.5 mm/s for realistic parameters. This corresponds to several meters per day - compatible with multi-year missions to Europa.
Power Budget Critical: The power constraint strongly influences design. More power enables faster penetration, but spacecraft power systems impose hard limits.
Energy vs Time Tradeoff: Minimizing time doesn’t minimize energy. Mission planners must choose based on mission priorities (faster arrival vs longer operational lifetime).
Heat Loss Matters: At slow speeds, conductive losses can exceed melting power. Insulation and thermal design become crucial.
Conclusion
Thermal design optimization for cryobots exemplifies multidisciplinary engineering. The mathematical framework combines heat transfer physics, optimization theory, and mission constraints. The Python implementation demonstrates how computational tools can explore complex design spaces and identify optimal solutions that might be non-intuitive.
For actual missions, this analysis would extend to include:
- Time-varying ice properties with depth
- Refreezing dynamics in the melt column
- Power system degradation over mission lifetime
- Navigation and communication requirements
- Sampling system energy demands
The methodology presented here provides a foundation for these more sophisticated analyses, showing how systematic optimization can guide the design of humanity’s ambassadors to alien oceans.