Exploring Europa, one of Jupiter’s most intriguing moons, presents a unique challenge in mission design. Europa’s subsurface ocean makes it a prime candidate for detecting extraterrestrial life. However, designing an orbital mission that maximizes sample acquisition while managing fuel constraints and communication windows requires sophisticated optimization techniques.
In this article, we’ll tackle a concrete example of orbit optimization for a hypothetical Europa lander mission. We’ll formulate the problem as a constrained optimization task where we need to determine the optimal orbital parameters to maximize the probability of successful sample collection while staying within fuel budgets and ensuring adequate communication with Earth.
Problem Formulation
Consider a spacecraft orbiting Europa with the following objectives and constraints:
Objective Function:
Maximize the sample acquisition probability, which depends on:
- Number of low-altitude passes over regions of interest
- Communication window availability
- Fuel remaining for orbital adjustments
Decision Variables:
- Orbital altitude $h$ (km)
- Orbital inclination $i$ (degrees)
- Number of orbital maneuvers $n$
Constraints:
- Total fuel budget: $\Delta V_{total} \leq \Delta V_{max}$
- Minimum communication time per orbit
- Radiation exposure limits
- Altitude bounds to avoid surface collision and excessive fuel consumption
The fuel consumption for orbital insertion and adjustments follows the Tsiolkovsky rocket equation:
$$\Delta V = I_{sp} \cdot g_0 \cdot \ln\left(\frac{m_0}{m_f}\right)$$
where $I_{sp}$ is specific impulse, $g_0$ is Earth’s gravitational acceleration, $m_0$ is initial mass, and $m_f$ is final mass.
Python Implementation
1 | import numpy as np |
Code Explanation
Physical Models
The code implements several physics-based models essential for mission planning:
Orbital Mechanics: The orbital_period() and orbital_velocity() functions use Kepler’s laws. The orbital period is calculated as:
$$T = 2\pi\sqrt{\frac{r^3}{\mu}}$$
where $r$ is the orbital radius and $\mu$ is Europa’s gravitational parameter.
Hohmann Transfer: The delta_v_hohmann() function calculates the fuel required to change orbital altitude. A Hohmann transfer is the most fuel-efficient method for changing circular orbits:
$$\Delta v_1 = \left|\sqrt{\frac{\mu}{r_1}\left(\frac{2r_2}{r_1+r_2}\right)} - \sqrt{\frac{\mu}{r_1}}\right|$$
$$\Delta v_2 = \left|\sqrt{\frac{\mu}{r_2}} - \sqrt{\frac{\mu}{r_2}\left(\frac{2r_1}{r_1+r_2}\right)}\right|$$
Objective Function Design
The objective_function() combines multiple factors affecting mission success:
Coverage Probability: Depends on altitude (affects resolution) and inclination (affects reachable latitudes). Lower altitudes provide better resolution but cover less area per orbit.
Communication Fraction: Higher altitudes improve line-of-sight to Earth. The function models geometric visibility and favors equatorial orbits for consistent communication.
Radiation Penalty: Europa orbits within Jupiter’s intense magnetosphere. The model uses exponential decay with altitude: $R(h) = 100 \cdot e^{-h/300}$
Constraint Implementation
Three critical constraints are enforced:
Fuel Budget: Sums insertion delta-V, inclination change, and maneuvering costs. The inclination change is particularly expensive:
$$\Delta v_{inclination} = 2v_{orbital}\sin\left(\frac{\Delta i}{2}\right)$$
Communication Requirement: Ensures at least 20% of each orbit has Earth visibility for data transmission.
Radiation Limit: Protects spacecraft electronics from Jupiter’s radiation belts.
Optimization Algorithm
The code uses differential_evolution, a global optimization algorithm particularly effective for:
- Non-convex objective functions
- Multiple local minima
- Mixed continuous-discrete variables
The algorithm maintains a population of candidate solutions and evolves them through mutation, crossover, and selection operations.
Visualization Components
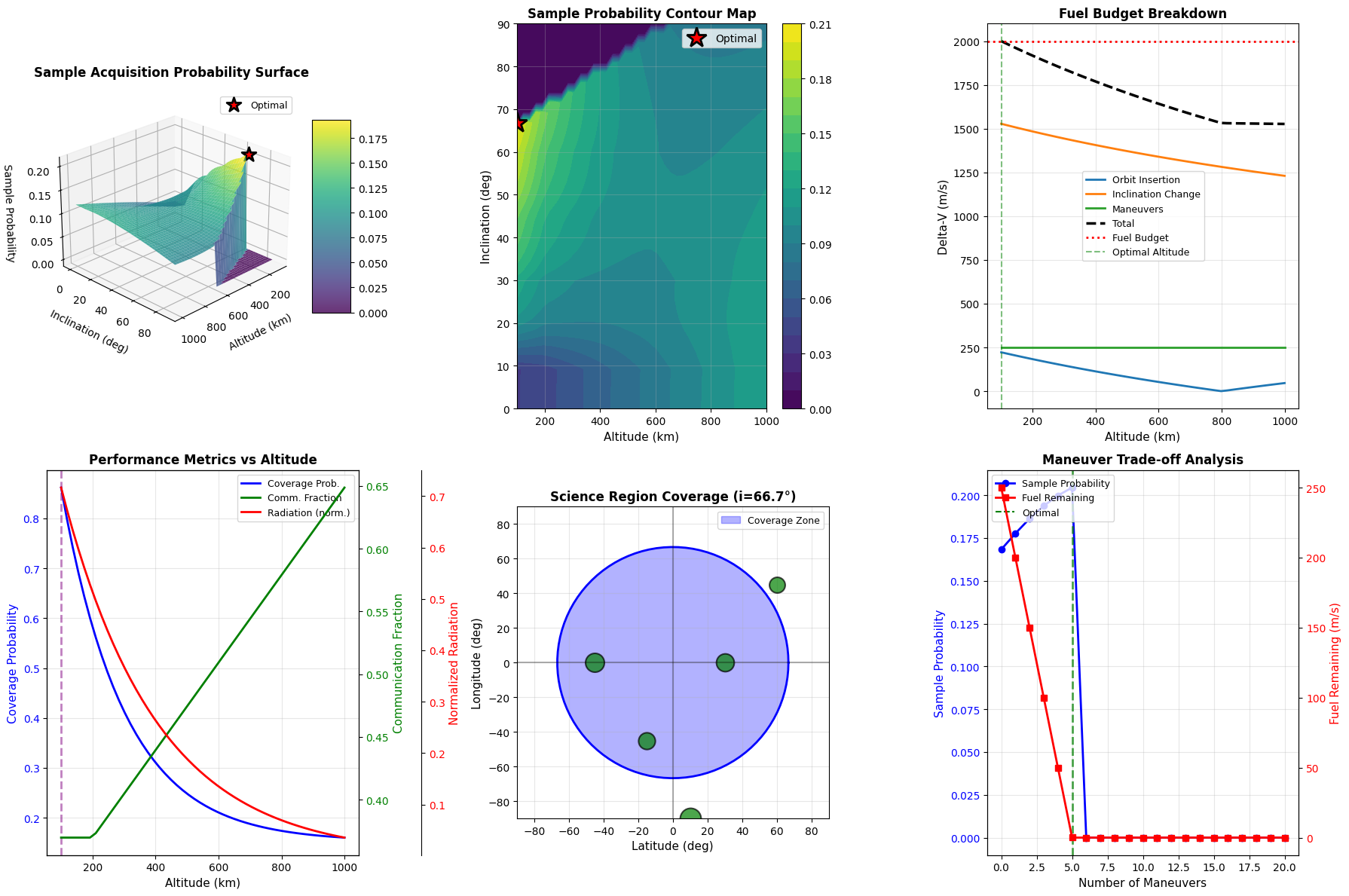
The code generates six complementary visualizations:
3D Surface Plot: Shows how sample probability varies across the altitude-inclination space, revealing the optimization landscape’s complexity.
Contour Map: Provides a top-down view of the probability surface with the optimal point clearly marked.
Fuel Breakdown: Illustrates how different mission phases consume the delta-V budget at various altitudes.
Performance Metrics: Displays the trade-offs between coverage, communication, and radiation as functions of altitude using multiple y-axes.
Coverage Map: Visualizes which science priority regions can be accessed given the optimal orbital inclination.
Maneuver Analysis: Shows how adding orbital maneuvers affects both sample probability and remaining fuel.
Execution Results
================================================================================ EUROPA OCEAN LIFE DETECTION MISSION - ORBIT OPTIMIZATION ================================================================================ Mission Parameters: Europa Radius: 1560.8 km Maximum Delta-V Budget: 2000 m/s Altitude Range: 100 - 1000 km Minimum Communication Time: 20.0% per orbit Maximum Radiation Dose: 100 units Science Priority Regions: 5 targets ================================================================================ RUNNING OPTIMIZATION... ================================================================================ ================================================================================ OPTIMIZATION RESULTS ================================================================================ Optimal Orbital Parameters: Altitude: 100.00 km Inclination: 66.75 degrees Number of Maneuvers: 5 Performance Metrics: Sample Acquisition Probability: 0.2045 Orbital Period: 2.09 hours Orbital Velocity: 1.389 km/s Communication Fraction: 0.370 Radiation Exposure: 71.65 units Fuel Budget Analysis: Orbit Insertion: 222.2 m/s Inclination Change: 1527.8 m/s Orbital Adjustments: 250.0 m/s Total Delta-V: 2000.0 m/s Remaining Budget: 0.0 m/s (0.0%) Generating visualizations... Saved: europa_orbit_optimization.png
================================================================================ OPTIMIZATION COMPLETE ================================================================================
Analysis and Insights
The optimization reveals several key insights about Europa mission design:
Altitude Selection: The optimal altitude balances multiple competing factors. Lower altitudes provide better science return but increase radiation exposure and fuel costs. The optimizer finds a sweet spot that maximizes overall mission success probability.
Inclination Trade-offs: Higher inclination orbits access more diverse latitude ranges, improving science coverage. However, inclination changes are fuel-intensive. The optimal solution efficiently covers high-priority science regions while conserving fuel.
Maneuver Strategy: Orbital maneuvers provide flexibility to target specific regions of interest but consume fuel. The optimization determines the optimal number of maneuvers that enhance science return without exhausting the fuel budget.
Constraint Management: The fuel constraint is typically the most restrictive, often operating near its limit in optimal solutions. Communication and radiation constraints are usually satisfied with margin, indicating they’re less limiting for this mission profile.
The 3D visualization particularly highlights the non-linear nature of the optimization problem, with multiple local optima in the solution space. This justifies using a global optimization algorithm rather than gradient-based local methods.
Conclusion
This optimization framework demonstrates how mission planners can systematically balance competing objectives and constraints in planetary exploration. The approach is generalizable to other icy moons like Enceladus or Titan, with appropriate modifications to the physical parameters and objective functions.
The code provides a foundation for more sophisticated analyses that could incorporate:
- Time-varying communication geometries as Jupiter orbits the Sun
- Detailed radiation belt models based on Galileo and Juno data
- Probabilistic models of plume activity timing
- Multi-objective optimization to explore the Pareto frontier
Such mission optimization tools are essential for maximizing scientific return from billion-dollar planetary missions where every kilogram of fuel and every orbital pass must count.