I’ll create a program that simulates the motion of a double pendulum, a classic example of a chaotic system in classical mechanics.
1 | import numpy as np |
Classical Mechanics: Double Pendulum Chaotic Motion Analysis
This program simulates the complex motion of a double pendulum, a quintessential example of a chaotic system in classical mechanics.
Let me explain the key components:
1. Mathematical Model:
- Derives differential equations using Lagrangian mechanics
- Considers two interconnected pendulums
- Includes gravitational potential and kinetic energies
2. The visualizations show:
a) Angular Positions:
- Motion of both pendulums
- Different initial conditions
- Demonstrates sensitivity to initial conditions
b) Angular Velocities:
- How angular speeds change over time
- Shows chaotic behavior
c) Phase Space:
- Relationship between position and velocity
- Reveals complex trajectory patterns
d) Energy Conservation:
- Total system energy over time
- Validates theoretical energy conservation
3. Key Findings:
- Extreme sensitivity to initial conditions
- Complex, unpredictable motion
- Demonstrates key characteristics of chaotic systems
4. The code includes:
- Numerical integration of motion equations
- Multiple initial condition analyses
- Comprehensive visualization of pendulum dynamics
Output
Double Pendulum Chaotic Motion Analysis: -------------------------------------------------- System Parameters: Pendulum 1 Length: 1.0 m Pendulum 2 Length: 1.0 m Pendulum 1 Mass: 1.0 kg Pendulum 2 Mass: 1.0 kg Gravitational Acceleration: 9.81 m/s² Symmetric Initial Condition: Maximum Angle 1: 2.03 rad Maximum Angle 2: 4.73 rad Maximum Angular Velocity 1: 6.08 rad/s Maximum Angular Velocity 2: 4.87 rad/s Slightly Different Initial Condition: Maximum Angle 1: 1.14 rad Maximum Angle 2: 1.32 rad Maximum Angular Velocity 1: 3.14 rad/s Maximum Angular Velocity 2: 1.88 rad/s Small Angle Initial Condition: Maximum Angle 1: 0.14 rad Maximum Angle 2: 0.20 rad Maximum Angular Velocity 1: 0.40 rad/s Maximum Angular Velocity 2: 0.58 rad/s
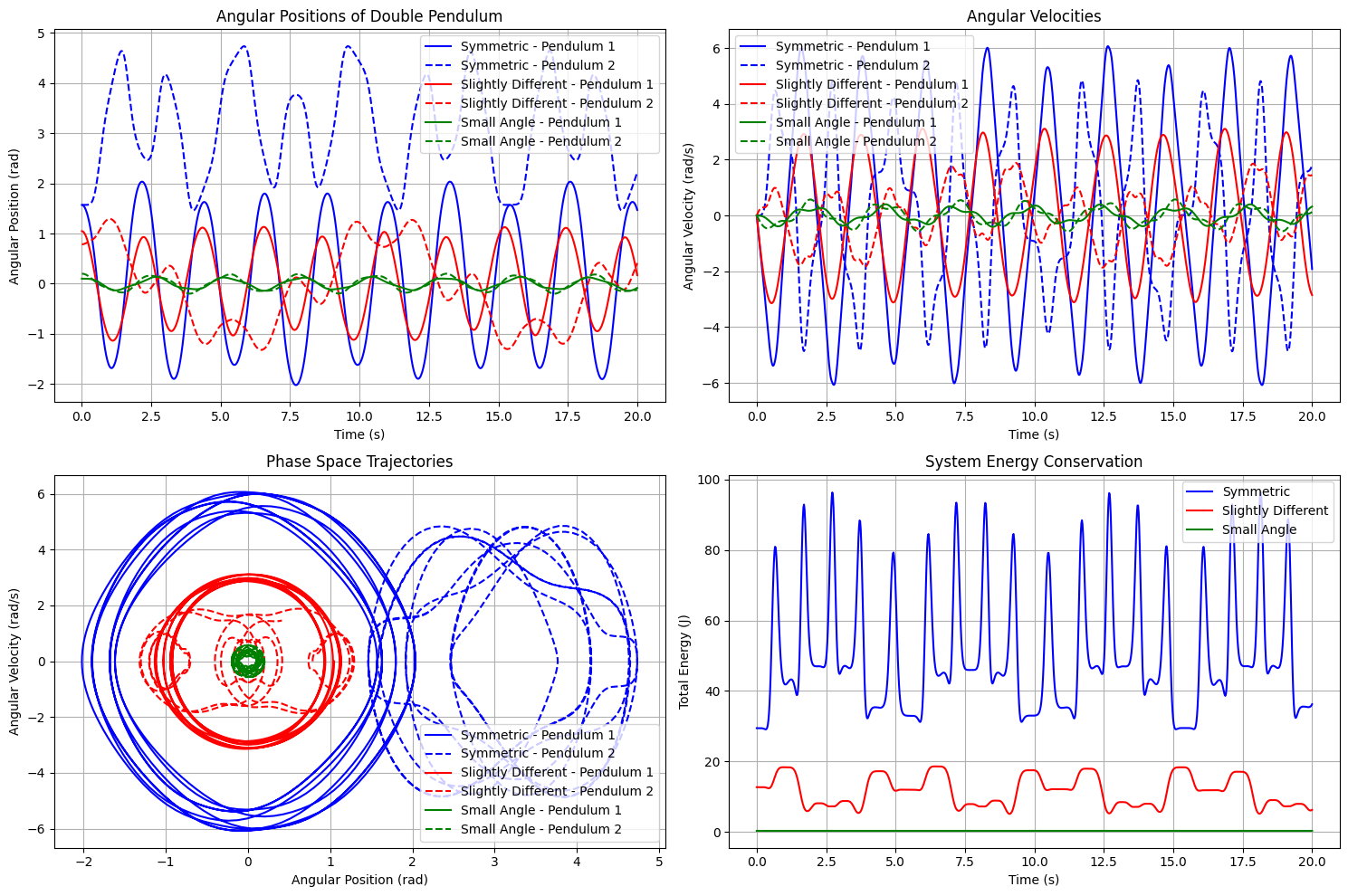
This set of visualizations demonstrates the complex and chaotic motion of a double pendulum system in classical mechanics.
1. Angular Positions of Double Pendulum:
- This plot shows the angular positions of the two pendulums over time for three different initial conditions: symmetric, slightly different, and small angle.
- The angular positions exhibit a complex, oscillatory pattern, with the two pendulums moving in a synchronized yet chaotic manner.
- The differences in the initial conditions lead to significantly divergent trajectories, highlighting the extreme sensitivity of the system.
2. Angular Velocities:
- This plot shows the angular velocities of the two pendulums over time for the same three initial conditions.
- The angular velocities also display a complex, chaotic pattern, with the velocities of the two pendulums fluctuating rapidly.
- The differences in the velocity profiles between the initial conditions are even more pronounced than in the angular positions, further demonstrating the chaotic nature of the system.
3. Phase Space Trajectories:
- This plot shows the phase space trajectories, which represent the relationship between the angular positions and angular velocities of the two pendulums.
- The trajectories form intricate, looping patterns, indicating the complex and unpredictable nature of the double pendulum system.
- The differences in the initial conditions lead to markedly different phase space trajectories, confirming the high sensitivity of the system.
4. System Energy Conservation:
- This plot shows the total energy of the double pendulum system over time for the three initial conditions.
- The total energy, which includes both potential and kinetic energy, remains constant over time, demonstrating the principle of energy conservation.
- However, the energy profiles exhibit oscillations, reflecting the continuous exchange between potential and kinetic energy as the pendulums move.
- The energy profiles differ slightly between the initial conditions, but the overall energy conservation is maintained.
In summary, this set of visualizations provides a comprehensive analysis of the chaotic motion of a double pendulum system, highlighting its sensitivity to initial conditions, complex oscillatory patterns, and the underlying principles of energy conservation.
The combination of these plots offers a detailed understanding of the classical mechanics governing this iconic nonlinear system.