カートポールをDQN(Deep Q-network)で解いていきます。
カートポールは棒を倒さないようにバランスをとるゲームです。
今回の強化学習のポイントは下記です。
目的は棒を倒さないようにバランスをとること。
1エピソードは棒を倒すまで。
状態は「カートの位置」「カートの速度」「棒の角度」「棒の角速度」の4種類。
行動は「カートの左移動」「カートの右移動」の2種類。
報酬はエピソード完了時に190ステップ以上で+1.
パラメータ更新間隔は行動1回ごと。
DQNでは行動価値関数を表形式ではなく、ニューラルネットワークで表現します。
Experience Replayd(経験を貯めておきあとでランダムに学習する)
Fixed Target Q-Network(更新計算のためにニューラルネットワークをもう1つ作る)
Reward Clipping(報酬のスケールを-1,0,1に統一する)
Huber Loss(誤差が大きい場合でも安定している関数huberを使う)
まずはGoogle Colabaratoryで動作確認するために環境を構築します。
1 2 !pip uninstall tensorflow -y !pip install tensorflow==1.13.1
カートポールの様子をアニメーションで確認するために、ディスプレイの設定を行います。
1 2 3 4 5 6 7 8 9 10 11 12 # ディスプレイ設定のインストール !apt-get -qq -y install xvfb freeglut3-dev ffmpeg> /dev/null !pip install pyglet==1.3.2 !pip install pyopengl !pip install pyvirtualdisplay # ディスプレイ設定の適用 from pyvirtualdisplay import Display import os disp = Display(visible=0, size=(1024, 768)) disp.start() os.environ['DISPLAY'] = ':' + str(disp.display) + '.' + str(disp.screen)
ここでいったんランタイムの再接続が必要になります。
次に必要なパッケージをインポートします。
1 2 3 4 5 6 7 8 import gymimport numpy as npfrom keras.models import Sequentialfrom keras.layers import Densefrom keras.optimizers import Adamfrom collections import dequefrom tensorflow.losses import huber_loss
パラメータを準備します。パラメータの内容はコメントを参照して下さい。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 NUM_EPISODES = 500 MAX_STEPS = 200 GAMMA = 0.99 WARMUP = 10 E_START = 1.0 E_STOP = 0.01 E_DECAY_RATE = 0.001 MEMORY_SIZE = 10000 BATCH_SIZE = 32
行動評価関数となるニューラルネットワークモデルを作成します。
1 2 3 4 5 6 7 8 9 10 11 12 13 class QNetwork : def __init__ (self, state_size, action_size ): self.model = Sequential() self.model.add(Dense(16 , activation='relu' , input_dim=state_size)) self.model.add(Dense(16 , activation='relu' )) self.model.add(Dense(16 , activation='relu' )) self.model.add(Dense(action_size, activation='linear' )) self.model.compile (loss=huber_loss, optimizer=Adam(lr=0.001 ))
経験メモリを定義します。メモリの内容は「状態」「行動」「報酬」「次の状態」の4種類となります。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 class Memory (): def __init__ (self, memory_size ): self.buffer = deque(maxlen=memory_size) def add (self, experience ): self.buffer.append(experience) def sample (self, batch_size ): idx = np.random.choice(np.arange(len (self.buffer)), size=batch_size, replace=False ) return [self.buffer[i] for i in idx] def __len__ (self ): return len (self.buffer)
環境を作成します。OpenAI Gymのgym.make()を使用します。
1 2 3 4 5 6 7 8 9 10 11 12 13 env = gym.make('CartPole-v0' ) state_size = env.observation_space.shape[0 ] action_size = env.action_space.n main_qn = QNetwork(state_size, action_size) target_qn = QNetwork(state_size, action_size) memory = Memory(MEMORY_SIZE)
学習を開始します。
環境をリセットする。
定義したエピソード数だけエピソードを繰り返す。
target-networkを更新する。
1エピソード分、ゲーム終了まで処理を実行する。
εを減らす。
ランダムまたは行動価値関数に従って、行動を取得する。
行動に応じて状態を報酬を得る。
エピソード完了時に190ステップ以上で報酬+1、成功回数に1加算する。
エピソード完了でないとき報酬に0を指定し、経験メモリに経験を追加する。
行動価値を更新する。
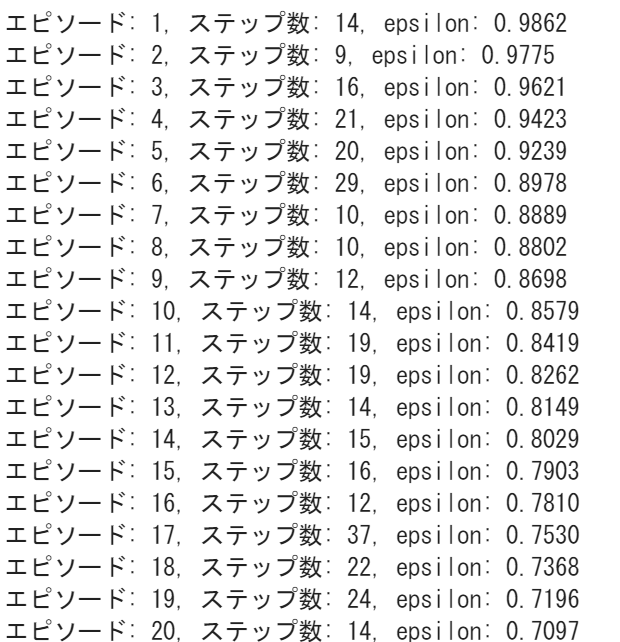
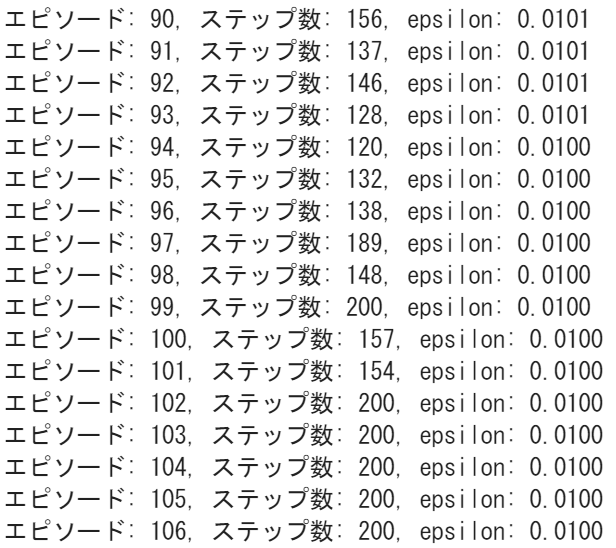
エピソード完了時のログを表示する。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 state = env.reset() state = np.reshape(state, [1 , state_size]) total_step = 0 success_count = 0 for episode in range (1 , NUM_EPISODES+1 ): step = 0 target_qn.model.set_weights(main_qn.model.get_weights()) for _ in range (1 , MAX_STEPS+1 ): step += 1 total_step += 1 epsilon = E_STOP + (E_START - E_STOP)*np.exp(-E_DECAY_RATE*total_step) if epsilon > np.random.rand(): action = env.action_space.sample() else : action = np.argmax(main_qn.model.predict(state)[0 ]) next_state, _, done, _ = env.step(action) next_state = np.reshape(next_state, [1 , state_size]) if done: if step >= 190 : success_count += 1 reward = 1 else : success_count = 0 reward = 0 next_state = np.zeros(state.shape) if step > WARMUP: memory.add((state, action, reward, next_state)) else : reward = 0 if step > WARMUP: memory.add((state, action, reward, next_state)) state = next_state if len (memory) >= BATCH_SIZE: inputs = np.zeros((BATCH_SIZE, 4 )) targets = np.zeros((BATCH_SIZE, 2 )) minibatch = memory.sample(BATCH_SIZE) for i, (state_b, action_b, reward_b, next_state_b) in enumerate (minibatch): inputs[i] = state_b if not (next_state_b == np.zeros(state_b.shape)).all (axis=1 ): target = reward_b + GAMMA * np.amax(target_qn.model.predict(next_state_b)[0 ]) else : target = reward_b targets[i] = main_qn.model.predict(state_b) targets[i][action_b] = target main_qn.model.fit(inputs, targets, epochs=1 , verbose=0 ) if done: break print ('エピソード: {}, ステップ数: {}, epsilon: {:.4f}' .format (episode, step, epsilon)) if success_count >= 5 : break state = env.reset() state = np.reshape(state, [1 , state_size])
最大ステップ数の200に少しずつ近づいていきます。
アニメーションフレームを作成します。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 frames = [] state = env.reset() state = np.reshape(state, [1 , state_size]) step = 0 for step in range (1 , MAX_STEPS+1 ): step += 1 frames.append(env.render(mode='rgb_array' )) action = np.argmax(main_qn.model.predict(state)[0 ]) next_state, reward, done, _ = env.step(action) next_state = np.reshape(next_state, [1 , state_size]) if done: next_state = np.zeros(state.shape) break else : state = next_state print ('ステップ数: {}' .format (step))
アニメーションフレームをアニメーションに変換して最終動作を確認します。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 !pip install JSAnimation import matplotlib.pyplot as pltfrom matplotlib import animationfrom JSAnimation.IPython_display import display_animationfrom IPython.display import displaydef display_frames_as_gif (frames ): plt.figure(figsize=(frames[0 ].shape[1 ]/72.0 , frames[0 ].shape[0 ]/72.0 ), dpi=72 ) patch = plt.imshow(frames[0 ]) plt.axis('off' ) def animate (i ): patch.set_data(frames[i]) anim = animation.FuncAnimation(plt.gcf(), animate, frames=len (frames), interval=50 ) display(display_animation(anim, default_mode='loop' )) display_frames_as_gif(frames)
最終的にうまくポールのバランスととることができています。
VIDEO
(Google Colaboratory で動作確認しています。)
参考
AlphaZero 深層学習・強化学習・探索 人工知能プログラミング実践入門 サポートページ