モンテカルロ法・TD法に続いてSARSAによる学習を試してみます。
Q-learning(TD法)は価値が最大となる状態に遷移する行動をとることを前提としますが、SARSAでは次の行動はself.Qに基づく戦略(self.Q)で決められることを前提とします。
まずはエージェントのベースになるクラスを実装します。(強化学習5・6 (モンテカルロ法・TD法)と同様です。)
el_agent.py 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 import numpy as npimport matplotlib.pyplot as pltclass ELAgent (): def __init__ (self, epsilon ): self.Q = {} self.epsilon = epsilon self.reward_log = [] def policy (self, s, actions ): if np.random.random() < self.epsilon: return np.random.randint(len (actions)) else : if s in self.Q and sum (self.Q[s]) != 0 : return np.argmax(self.Q[s]) else : return np.random.randint(len (actions)) def init_log (self ): self.reward_log = [] def log (self, reward ): self.reward_log.append(reward) def show_reward_log (self, interval=50 , episode=-1 ): if episode > 0 : rewards = self.reward_log[-interval:] mean = np.round (np.mean(rewards), 3 ) std = np.round (np.std(rewards), 3 ) print ("At Episode {} average reward is {} (+/-{})." .format ( episode, mean, std)) else : indices = list (range (0 , len (self.reward_log), interval)) means = [] stds = [] for i in indices: rewards = self.reward_log[i:(i + interval)] means.append(np.mean(rewards)) stds.append(np.std(rewards)) means = np.array(means) stds = np.array(stds) plt.figure() plt.title("Reward History" ) plt.grid() plt.fill_between(indices, means - stds, means + stds, alpha=0.1 , color="g" ) plt.plot(indices, means, "o-" , color="g" , label="Rewards for each {} episode" .format (interval)) plt.legend(loc="best" ) plt.show()
次に環境を扱うためのクラスを実装します。
frozen_lake_util.py 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 import numpy as npimport matplotlib.pyplot as pltimport matplotlib.cm as cmimport gymfrom gym.envs.registration import registerregister(id ="FrozenLakeEasy-v0" , entry_point="gym.envs.toy_text:FrozenLakeEnv" , kwargs={"is_slippery" : False }) def show_q_value (Q ): """ FrozenLake-v0環境での価値は下記の通り。 各行動での評価を表しています。 +----+------+----+ | | 上 | | | 左 | 平均 | 右 | | | 下 | | +-----+------+----+ """ env = gym.make("FrozenLake-v0" ) nrow = env.unwrapped.nrow ncol = env.unwrapped.ncol state_size = 3 q_nrow = nrow * state_size q_ncol = ncol * state_size reward_map = np.zeros((q_nrow, q_ncol)) for r in range (nrow): for c in range (ncol): s = r * nrow + c state_exist = False if isinstance (Q, dict ) and s in Q: state_exist = True elif isinstance (Q, (np.ndarray, np.generic)) and s < Q.shape[0 ]: state_exist = True if state_exist: _r = 1 + (nrow - 1 - r) * state_size _c = 1 + c * state_size reward_map[_r][_c - 1 ] = Q[s][0 ] reward_map[_r - 1 ][_c] = Q[s][1 ] reward_map[_r][_c + 1 ] = Q[s][2 ] reward_map[_r + 1 ][_c] = Q[s][3 ] reward_map[_r][_c] = np.mean(Q[s]) fig = plt.figure() ax = fig.add_subplot(1 , 1 , 1 ) plt.imshow(reward_map, cmap=cm.RdYlGn, interpolation="bilinear" , vmax=abs (reward_map).max (), vmin=-abs (reward_map).max ()) ax.set_xlim(-0.5 , q_ncol - 0.5 ) ax.set_ylim(-0.5 , q_nrow - 0.5 ) ax.set_xticks(np.arange(-0.5 , q_ncol, state_size)) ax.set_yticks(np.arange(-0.5 , q_nrow, state_size)) ax.set_xticklabels(range (ncol + 1 )) ax.set_yticklabels(range (nrow + 1 )) ax.grid(which="both" ) plt.show()
SARSAでの学習を実行します。
sarsa.py 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 from collections import defaultdictimport gymfrom el_agent import ELAgentfrom frozen_lake_util import show_q_valueclass SARSAAgent (ELAgent ): def __init__ (self, epsilon=0.1 ): super ().__init__(epsilon) def learn (self, env, episode_count=1000 , gamma=0.9 , learning_rate=0.1 , render=False , report_interval=50 ): self.init_log() actions = list (range (env.action_space.n)) self.Q = defaultdict(lambda : [0 ] * len (actions)) for e in range (episode_count): s = env.reset() done = False a = self.policy(s, actions) while not done: if render: env.render() n_state, reward, done, info = env.step(a) n_action = self.policy(n_state, actions) gain = reward + gamma * self.Q[n_state][n_action] estimated = self.Q[s][a] self.Q[s][a] += learning_rate * (gain - estimated) s = n_state a = n_action else : self.log(reward) if e != 0 and e % report_interval == 0 : self.show_reward_log(episode=e) def train (): agent = SARSAAgent() env = gym.make("FrozenLakeEasy-v0" ) agent.learn(env, episode_count=500 ) show_q_value(agent.Q) agent.show_reward_log() if __name__ == "__main__" : train()
FrozenLake
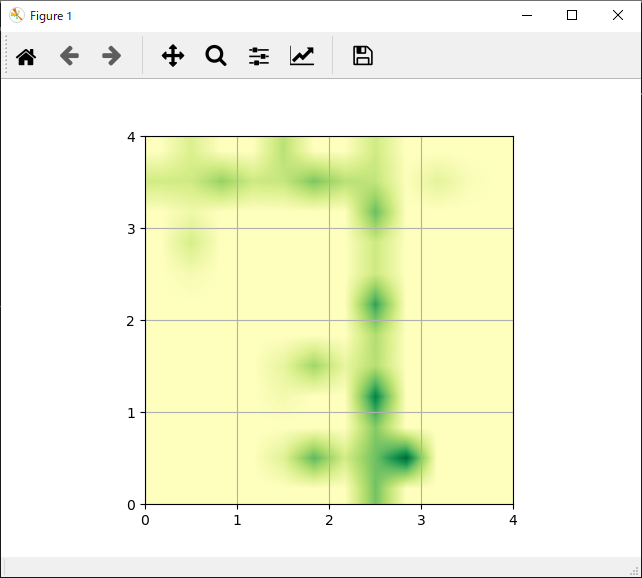
各行動の評価
モンテカルロ法、TD法とは違う経路が高く評価されていますが、全体的にゴール向かう行動が高く評価されています。
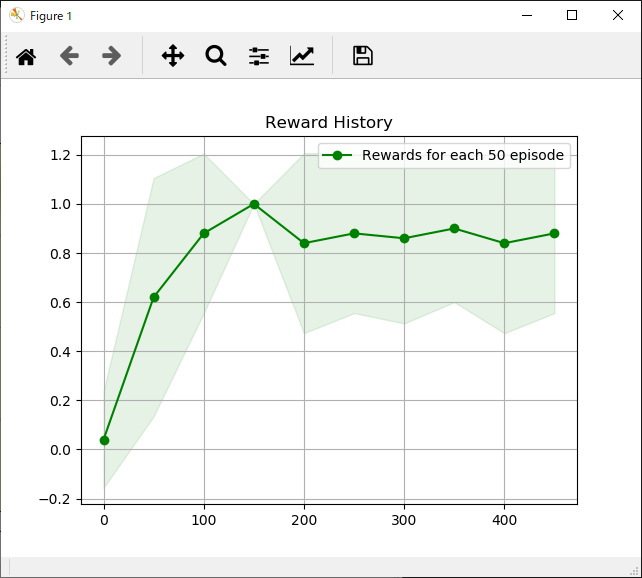
エピソード実行回数と獲得報酬平均の推移は次のようになります。
参考
Pythonで学ぶ強化学習 -入門から実践まで- サンプルコード