1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
| import sys
import gym
import numpy as np
import gym.spaces
class MyEnv(gym.Env):
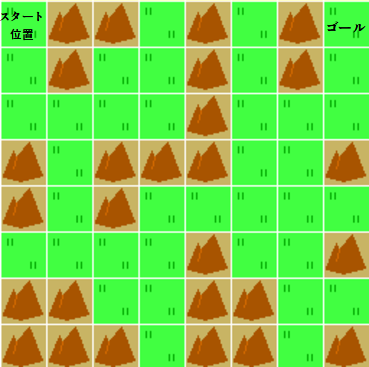
FIELD_TYPES = [
'S',
'G',
' ',
'山',
'☆',
]
MAP = np.array([
[0, 3, 3, 2, 3, 2, 3, 1],
[2, 3, 2, 2, 3, 2, 3, 2],
[2, 2, 2, 2, 3, 2, 2, 2],
[3, 2, 3, 3, 3, 2, 2, 3],
[3, 2, 3, 2, 2, 2, 2, 2],
[2, 2, 2, 2, 3, 2, 2, 3],
[3, 3, 2, 2, 3, 3, 2, 2],
[3, 3, 3, 2, 3, 3, 2, 3]
])
MAX_STEPS = 200
def __init__(self):
super().__init__()
self.action_space = gym.spaces.Discrete(4)
self.observation_space = gym.spaces.Box(
low=0,
high=len(self.FIELD_TYPES),
shape=self.MAP.shape
)
self.reset()
def reset(self):
self.pos = self._find_pos('S')[0]
self.goal = self._find_pos('G')[0]
self.done = False
self.steps = 0
return self._observe()
def step(self, action):
if action == 0:
next_pos = self.pos + [0, 1]
elif action == 1:
next_pos = self.pos + [0, -1]
elif action == 2:
next_pos = self.pos + [1, 0]
elif action == 3:
next_pos = self.pos + [-1, 0]
if self._is_movable(next_pos):
self.pos = next_pos
moved = True
else:
moved = False
observation = self._observe()
reward = self._get_reward(self.pos, moved)
self.done = self._is_done()
return observation, reward, self.done, {}
def render(self, mode='console', close=False):
for row in self._observe():
for elem in row:
print(self.FIELD_TYPES[elem], end='')
print()
def _close(self):
pass
def _seed(self, seed=None):
pass
def _get_reward(self, pos, moved):
if moved and (self.goal == pos).all():
return 100
else:
return -1
def _is_movable(self, pos):
return (
0 <= pos[0] < self.MAP.shape[0]
and 0 <= pos[1] < self.MAP.shape[1]
and self.FIELD_TYPES[self.MAP[tuple(pos)]] != '山'
)
def _observe(self):
observation = self.MAP.copy()
observation[tuple(self.pos)] = self.FIELD_TYPES.index('☆')
return observation
def _is_done(self):
if (self.pos == self.goal).all():
return True
elif self.steps > self.MAX_STEPS:
return True
else:
return False
def _find_pos(self, field_type):
return np.array(list(zip(*np.where(self.MAP == self.FIELD_TYPES.index(field_type)))))
|